Однако он не сформулировал того словаря, который необходим для перевода с дневного на ночной язык и обратно величин компонент. Конечно, выводы студента были ценными, но ведь случается же, когда дневной землемер должен знать не только величину расстояния 𝑂𝐴, но и конкретные координаты (Δ𝑥,Δ𝑦) этого отрезка. При этом может оказаться, что по воле судеб ему недоступно прямое измерение этих компонент. Тогда в его распоряжении будут лишь данные о компонентах (Δ𝑥',Δ𝑦'), полученные при измерении 𝑂𝐴 его коллегой — ночным землемером. Как же ему перевести имеющиеся в его распоряжении числа (Δ𝑥',Δ𝑦') на его «язык» и получить требуемые (Δ𝑥,Δ𝑦)? Каким должен быть словарь? И что должен он знать, чтобы быть в состоянии этот словарь составить? Вот ответ.
Эвклидово преобразование поворота координатных осей
Подобно тому, как для построения формул преобразования Лоренца, переводящих (Δ𝑥',Δ𝑦') в (Δ𝑥,Δ𝑦), необходимо знать относительную скорость движения двух систем отсчёта β𝑟, для перевода компонент (Δ𝑥',Δ𝑦') в (Δ𝑥,Δ𝑦) требуется знать величину наклона 𝑆𝑟 прямой 𝑂𝑦' относительно прямой 𝑂𝑦. В примере, изображённом на рис. 26, наклон оси 𝑂𝑦' к оси 𝑂𝑦 равен 𝑆𝑟=³/₄. Это значит, что при перемещении вверх по оси 𝑦 на 4 единицы необходимо сдвинуться от неё вправо на 3 единицы, чтобы оказаться на оси 𝑦'. Если выразить через величину наклона 𝑆𝑟 формулу преобразования поворота, мы получим
Δ
𝑥
=
Δ𝑥'
√1+𝑆𝑟²
+
𝑆𝑟Δ𝑦'
√1+𝑆𝑟²
,
Δ
𝑦
=-
𝑆𝑟Δ𝑥'
√1+𝑆𝑟²
+
Δ𝑦'
√1+𝑆𝑟²
.
(19)
Доказательство.
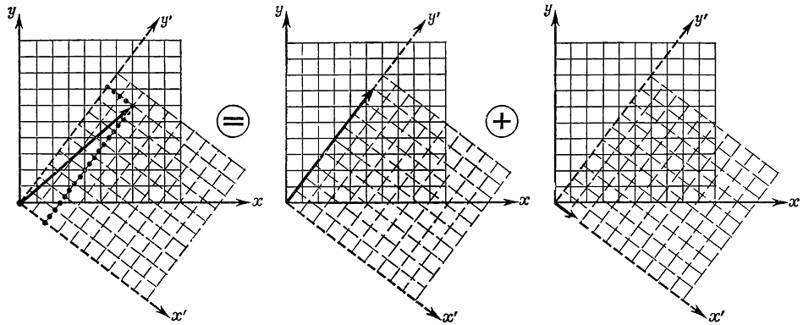
Рис. 27. Представление произвольного вектора как геометрической суммы двух векторов, направленных соответственно вдоль осей 𝑦' и 𝑥'. Это представление использовано при выводе уравнений (19) закона преобразования поворота (см. текст).
1. Произвольный вектор (Δ𝑥',Δ𝑦') может рассматриваться (см. рис. 27) как сумма вектора (Δ𝑥',0), направленного вдоль оси 𝑥', и вектора (0,Δ𝑦'), направленного вдоль оси 𝑦'. Для общего доказательства справедливости формул (19) достаточно удостовериться в том, что они верны по отдельности для этих двух векторов.
2. Вектор, направленный вдоль оси 𝑦' и имеющий длину Δ𝑦' обладает относительно осей 𝑥 и 𝑦 компонентами, относящимися друг к другу как 𝑆𝑟 по определению «наклона». Итак,
Δ𝑥
Δ𝑦
=
𝑆
𝑟
,
или
⎛
⎜
⎝
Δ𝑥
Δ𝑦
⎞²
⎟
⎠
=
𝑆
𝑟
²
,
или
(
Δ
𝑥)²
=
𝑆
𝑟
²
⋅
(
Δ
𝑦)²
.
3. Расстояние от начала координат до конца вектора имеет одну и ту же величину в обеих системах координат:
(
Δ
𝑥)²
+
(
Δ
𝑦)²
=
(
Δ
𝑥')²
+
(
Δ
𝑦')²
,
или
𝑆
𝑟
²
(
Δ
𝑦)²
+
(
Δ
𝑦)²
=
0
+
(
Δ
𝑦')²
,
или
(
Δ
𝑦)²
=
(Δ𝑦')²
1+𝑆𝑟²
,
или, наконец,
Δ
𝑦
=
Δ𝑦'
√1+𝑆𝑟²
,
так что
Δ
𝑥
=
𝑆
𝑟
Δ
𝑦
=
𝑆𝑟Δ𝑦'
√1+𝑆𝑟²
.
Сравнивая эти результаты с формулами преобразования поворота (19), мы убеждаемся в правильности коэффициентов при Δ𝑦'.
4. Аналогично рассмотрим вектор, направленный вдоль оси 𝑥' и имеющий компоненты (Δ𝑥',0). Его компоненты вдоль осей 𝑦 и 𝑥 находятся друг к другу в отношении
Δ𝑦
Δ𝑥
=-
𝑆
𝑟
.
Это равенство вместе с фактом инвариантности длины
(
Δ
𝑥)²
+
(
Δ
𝑦)²
=
(
Δ
𝑥')²
+
0
приводит в ходе рассуждений, аналогичных предыдущим, к соотношениям
Δ
𝑥
=
Δ𝑥'
√1+𝑆𝑟²
,
Δ
𝑦
=-
𝑆𝑟Δ𝑥'
√1+𝑆𝑟²
.
Тем самым мы проверили остальные два коэффициента в формулах (19) эвклидова преобразования поворота.
Относительный наклон осей 𝑆𝑟 в геометрии Эвклида аналогичен относительной скорости β𝑟 в геометрии Лоренца
Подводя итоги, можно сказать, что ковариантное преобразование в геометрии Эвклида от (Δ𝑥',Δ𝑦') к (Δ𝑥,Δ𝑦) с очевидностью аналогично преобразованию от (Δ𝑥',Δ𝑡') к (Δ𝑥,Δ𝑡) в лоренцевой геометрии реального физического мира. Величина наклона 𝑆𝑟 осей одной системы координат относительно соответствующих осей другой системы аналогична скорости β𝑟 одной инерциальной системы отсчёта относительно другой. Отношения катетов прямоугольного треугольника к его гипотенузе в эвклидовой геометрии
1
√1+𝑆𝑟²
и
𝑆𝑟
√1+𝑆𝑟²
заменяются в лоренцевой геометрии выражениями
1
√1-β𝑟²
и
β𝑟
√1-β𝑟²
.
Противоположны лишь знаки при 𝑆𝑟 и β𝑟 в знаменателях этих выражений. Знак «минус» в лоренцевой геометрии связан с минусом в выражении для квадрата интервала.
9. ПАРАМЕТР СКОРОСТИ
Аддитивность углов подсказывает возможность определения аддитивного параметра скорости
Всё ли исчерпано? Мы выяснили, как перейти от компонент взаимной удалённости событий, известных в одной системе отсчёта, к аналогичным компонентам в другой системе отсчёта. Короче, мы записали ковариантный закон, связывающий компоненты в разных системах, как для преобразования Лоренца («преобразование в плоскости 𝑥, 𝑡), так и для поворота («преобразование в плоскости 𝑥, 𝑡). В первом случае формулы содержат параметр β𝑟 (относительную скорость систем), а во втором — параметр 𝑆𝑟 (относительный наклон осей). Однако ни один из этих параметров не позволяет ещё получить самое простое описание взаимоотношения рассматриваемых систем координат. Было бы желательно заменить как β𝑟, так и 𝑆𝑟 более естественными параметрами. Оказывается, найти такой более удобный способ описания движения и поворота систем можно. Лучшей характеристикой поворота является угол. Аналогично самой удобной характеристикой движения систем вместо скорости является некоторый параметр скорости θ, который ещё должен быть найден. Лучше всего можно понять смысл и значение этого параметра скорости при описании относительного движения систем отсчёта, если сначала выяснить, почему угол — более удобный параметр, чем наклон при описании поворота.