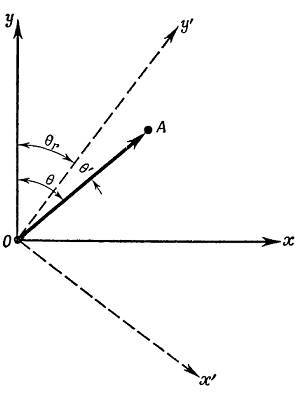
Ответ таков: потому что углы аддитивны, а наклоны — нет. Что означает это утверждение? Взглянем на рис. 26. Вектор 𝑂𝐴 имеет наклон относительно оси 𝑦'. Этот наклон можно описать величиной 𝑆' (отношением числа единиц длины в направлении оси 𝑥, приходящегося на единицу расстояния в направлении оси 𝑦'). В данном случае мы имеем
𝑆'
=
2
9
.
Вместе с тем вектор 𝑂𝐴 имеет наклон к оси 𝑦, равный
𝑆
=
7
6
,
а ось 𝑦' в свою очередь обладает относительно оси 𝑦 наклоном
𝑆
𝑟
=
3
4
.
Вопрос: выполняется ли следующий закон для наклонов:
⎛
⎜
⎜
⎝
Наклон 𝑂𝐴
относительно
оси 𝑦
⎞
⎟
⎟
⎠
=
⎛
⎜
⎜
⎝
Наклон 𝑂𝐴
относительно
оси 𝑦'
⎞
⎟
⎟
⎠
+
⎛
⎜
⎜
⎝
Наклон 𝑦'
относительно
оси 𝑦
⎞
⎟
⎟
⎠
?
Наклоны в эвклидовой геометрии не аддитивны
Проверка («экспериментальная математика»):
7
6
=
2
9
+
3
4
?
42
36
=
8
36
+
27
36
?
42
=
8
+
27
=
35
?!
Неверно!
Вывод: наклоны не аддитивны! Вопрос: раз наклоны не аддитивны, т.е. 𝑆 не равняется сумме 𝑆' и 𝑆𝑟, то как же найти правильно наклон 𝑆 из наклонов 𝑆' и 𝑆𝑟? Ответ:
(по определению наклона)
⎛
⎜
⎜
⎝
Наклон 𝑂𝐴
относительно
оси 𝑦
⎞
⎟
⎟
⎠
=
𝑆
=
Δ𝑥
Δ𝑦
=
[из (19)]
=
(1+𝑆𝑟²)⁻¹/²Δ𝑥'+𝑆𝑟⋅(1+𝑆𝑟²)⁻¹/²Δ𝑦'
-𝑆𝑟(1+𝑆𝑟²)⁻¹/²Δ𝑥'+(1+𝑆𝑟²)⁻¹/²Δ𝑦'
=
[сокращение числителя и
знаменателя на
(1+𝑆
𝑟
²)⁻¹
/
²
]
=
Δ𝑥'+𝑆𝑟Δ𝑦'
-𝑆𝑟Δ𝑥'+Δ𝑦'
=
(деление числителя и знаменателя на
Δ
𝑦'
)
=
(Δ𝑥'/Δ𝑦')+𝑆𝑟
-𝑆𝑟(Δ𝑥'/Δ𝑦')+1
.
Окончательный вывод:
𝑆
=
𝑆'+𝑆𝑟
1-𝑆'𝑆𝑟
.
(20)
Иными словами, наклоны 𝑆' и 𝑆𝑟 могут считаться аддитивными, лишь если произведением 𝑆'•𝑆𝑟 стоящим в знаменателе, можно пренебречь по сравнению с единицей.
Аддитивны углы наклона
Рис. 28. Угол — удобная мера наклона оси 𝑦' относительно оси 𝑦. Удобство здесь в том. что углы подчиняются простому правилу сложения: θ=θ'+θ𝑟.
Так как наклоны не аддитивны, а значит, неудобны для описания относительного поворота двух систем координат, то как же выбрать лучшую характеристику этого поворота? Ответ: взять угол между осями 𝑦 и 𝑦'. Почему? Потому что углы подчиняются простому закону сложения (рис. 28):
⎛
⎜
⎝
Угол между
𝑂𝐴 и осью 𝑦
⎞
⎟
⎠
=
⎛
⎜
⎝
Угол между
𝑂𝐴 и осью 𝑦'
⎞
⎟
⎠
+
⎛
⎜
⎝
Угол между
осями 𝑦' и 𝑦
⎞
⎟
⎠
,
или
θ
=
θ'
+
θ
𝑟
.
(21)
Благодаря выполнению этого соотношения угол является простейшей характеристикой наклона.
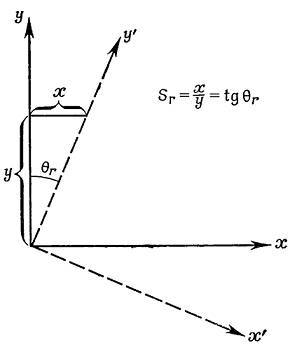
Как связаны между собой новая и старая характеристики наклона — угол θ и наклон 𝑆𝑟 оси 𝑦' относительно оси 𝑦? Ответ:
𝑆
𝑟
=
tg θ
𝑟
(22)
(по тригонометрическому определению функции тангенса; см. рис. 29).
Рис. 29. Связь между взаимным наклоном 𝑆𝑟 осей 𝑦' и 𝑦 двух эвклидовых систем координат и углом θ𝑟 между этими осями.
Закон сложения величин наклона в эвклидовой геометрии
Вопрос: как можно расшифровать закон сложения величин наклона, если исходить из того, что эти величины суть тангенсы углов? Ответ:
tg θ
=
tg (θ'+θ
𝑟
)
=
⎛
⎜
⎝
аддитивность
углов
⎞
⎟
⎠
=
tg θ'+tg θ𝑟
1-tg θ'•tg θ𝑟
,
(тригонометрия)
(23)
или
𝑆
=
𝑆'+𝑆𝑟
1-𝑆'•𝑆𝑟
•
⎛
⎜
⎝
тангенсы заменены
на величины наклонов
⎞
⎟
⎠
Сравнивая сложный закон сложения тангенсов (величин наклона) с простым законом сложения углов (θ=θ'+θ𝑟), мы убеждаемся в том, что угол — простейшая характеристика поворота.
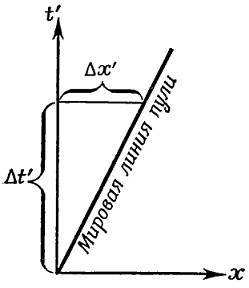
Закон сложения скоростей
Рис. 30. Мировая линия пули, изображённая на диаграмме пространства-времени системы отсчёта ракеты. Пуля была выпущена вперёд по движению ракеты со скоростью β'=Δ𝑥'/Δ𝑡' в системе отсчёта ракеты.
Что же будет простейшей характеристикой движения? Во всяком случае, не сама скорость, так как она не подчиняется простому закону сложения. Определим этот закон сложения скоростей. Пусть в системе отсчёта ракеты будет в направлении вперёд по её движению выстрелена пуля со скоростью β' в этой системе (рис. 30):
β'
=
Число метров,
пройденных в
направлении оси 𝑥'
за каждый
⎛
⎜