φ
=
θ₀+ρθ₁
1+ρ
,
где θ₀ - нулевое показание шкалы, а θ₁ - максимальное отклонение при первом колебании.
Таким способом можно вычислить отклонение, не дожидаясь, пока магнит придёт в состояние покоя в новом положении равновесия.
Как выполнить серию наблюдений
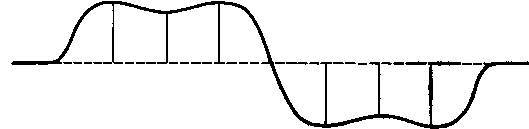
Рис. 58
746. Наилучший способ для проведения значительного числа измерений постоянного тока состоит в том, чтобы наблюдать три элонгации при положительном направлении тока, далее разомкнуть контакт примерно на время одного колебания, с тем чтобы магнит перешёл в положение отрицательного отклонения, затем изменить направление тока на противоположное и наблюдать три последовательные элонгации на отрицательной стороне, далее снова прервать контакт на время одного колебания и повторить наблюдения на положительной стороне и так далее, пока не будет произведено достаточное число наблюдений. При этом исключаются ошибки, которые могут возникнуть из-за изменения направления земной магнитной силы в течение времени наблюдения. Оператор, тщательно следя за временем замыкания и размыкания контакта, может легко регулировать размах колебаний, так чтобы сделать их достаточно малыми, но отчётливо различимыми. Движение магнита графически представлено на рис. 58, где абсцисса соответствует времени, а ордината - отклонению магнита. Если θ₁…θ₆ - наблюдаемые алгебраические значения элонгаций, то отклонение магнита определяется уравнением
8φ
=
θ₁
+
2θ₂
+
θ₃
-
θ₄
-
2θ₅
-
θ₆
.
Метод умножения
747. В некоторых случаях, когда отклонение магнита гальванометра очень мало, может быть целесообразно увеличить визуальный эффект путём изменения направления тока в надлежащие моменты времени, с тем чтобы магнит стал совершать колебательные движения. Для этой цели после установления времени одного колебания магнита в положительном направлении пропускается ток в течение времени 𝑇, а затем в течение равного ему промежутка времени ток пропускается в отрицательном направлении и так далее. Когда движение магнита станет видимым, мы можем менять направление тока в моменты наибольшего отклонения.
Пусть магнит находится в положении крайнего положительного отклонения θ₀ через катушку пропускается ток в отрицательном направлении. Тогда точкой равновесия будет φ, а максимальное отрицательное отклонение магнита θ₁ будет таким, что
-ρ(φ+θ₁)
=
(θ₀+φ)
,
или
-ρθ₁
=
θ₀
+
(ρ+1)φ
.
Аналогично, если теперь ток сделать положительным на то время, пока магнит поворачивается в положение θ₂:
ρθ₂
=-
θ₁
+
(ρ+1)φ
,
или
ρ²θ₂
=
θ₀
+
(ρ+1)²φ
,
и если направление тока меняется на противоположное последовательно 𝑛 раз, мы находим
(-1)
𝑛
θ
𝑛
=
ρ
-𝑛
θ₀
+
ρ+1
ρ-1
(1-ρ
-𝑛
)φ
,
откуда можно найти φ в виде
φ
=
(θ
𝑛
-ρ
-𝑛
θ₀)
ρ-1
1
.
ρ+1
1-ρ
-𝑛
Если число 𝑛 столь велико, что величиной ρ-𝑛 можно пренебречь, то это выражение принимает вид
φ
=
ρ-1
ρ+1
.
Для применения этого метода при точных измерениях необходимо точно знать ρ - величину отношения амплитуд двух соседних колебаний, зависящую от сопротивлений, действующих на магнит. Неточности, возникающие из-за того, что трудно избежать неопределённости в значении ρ, обычно перевешивают преимущества больших угловых отклонений. И только когда мы хотим установить существование очень малых токов, создавая с их помощью видимое движение стрелки, этот метод действительно полезен.
Об измерении переходных токов
748. Когда ток длится только в течение небольшой доли времени колебания магнита гальванометра, общее количество электричества, перенесённое током, можно измерить через угловую скорость, сообщённую магниту за время прохождения тока; эту величину можно определить по величине максимального отклонения при первом колебании магнита.
Если мы пренебрежём сопротивлением, которое приводит к затуханию колебаний магнита, исследование становится очень простым.
Пусть γ -сила тока в произвольный момент времени, а 𝑄 - количество электричества, которое он переносит; тогда
𝑄
=
∫
γ
𝑑𝑡
.
(1)
Пусть 𝑀 - магнитный момент, 𝐴 - момент инерции магнита вместе с подвешенной аппаратурой, а θ -угол, который образует магнит с плоскостью катушки; тогда
𝐴
𝑑²θ
𝑑𝑡²
+
𝑀𝐻
sin θ
=
𝑀𝐺γ
cos θ
.
(2)
Если время прохождения тока очень мало, мы можем произвести интегрирование по 𝑡 в течение этого короткого промежутка времени, не принимая во внимание изменение θ, и мы найдём
𝐴
𝑑θ
𝑑𝑡
+
𝑀𝐺
cos θ₀
∫
γ
𝑑𝑡
+
𝐶
=
𝑀𝐺𝑄
cos θ₀
+
𝐶
.
(3)
Отсюда видно, что прохождение заряда 𝑄 создаёт момент количества движения магнита, равный 𝑀𝐺𝑄 cos θ₀, где θ₀ есть значение θ в момент прохождения тока. Если первоначально магнит находился в положении равновесия, мы можем положить θ₀=0, 𝐶=0.
Далее магнит свободно поворачивается и достигает отклонения θ₁. Если сопротивление отсутствует, работа, совершаемая против магнитной силы за время этого перемещения, равна 𝑀𝐻(1-cos θ₁).
Энергия, сообщённая магниту током, равна
1
2
𝐴
⎛
⎜
⎝
𝑑θ
𝑑𝑡
⎞²
⎟
⎠
.
Приравнивая эти величины, мы находим
⎛
⎜
⎝
𝑑θ
𝑑𝑡
⎞²
⎟
⎠
=
2
𝑀𝐻
𝐴
(1-cos θ₁)
,
(4)
откуда
𝑑θ
𝑑𝑡
=
2
⎛
⎜
⎝
𝑀𝐻
𝐴
⎞½
⎟
⎠
sin ½θ₁
=
𝑀𝐺
𝐴
𝑄
(согласно (3)).
(5)
Но время 𝑇 одного колебания магнита от состояния покоя до состояния покоя равно
𝑇
=
π
⎛
⎜
⎝
𝐴
𝑀𝐻
⎞½
⎟
⎠
,