Обход препятствий. В боевой обстановке на маршруте движения нередко могут встретиться не только естественные, но и искусственные препятствия (минные поля, завалы в лесу и т. д.), которые легче обойти, чем преодолеть. Обход препятствий совершается так: на противоположной стороне препятствия точно по направлению движения замечают какой-нибудь местный предмет и глазомерно определяют расстояние; затем подсчитывают расстояние, пройденное до точки остановки перед препятствием, а после, обойдя препятствие, выходят к замеченному предмету на противоположной стороне препятствия; встав у этого предмета, прибавляют к расстоянию, пройденному до точки остановки, измеренную ширину препятствий и, определив по компасу направление дальнейшего пути, продолжают движение.
Чтобы после обхода препятствия убедиться в правильности выхода к намеченному за препятствием предмету (ориентиру), следует определить с него обратный азимут на точку остановки перед препятствием. В этом случае точка остановки перед предприятием должна быть отмечена на местности выставленной на ней вехой, затесом на дереве или любым другим способом. Обратный азимут должен отличаться от азимута направления движения на 180°.
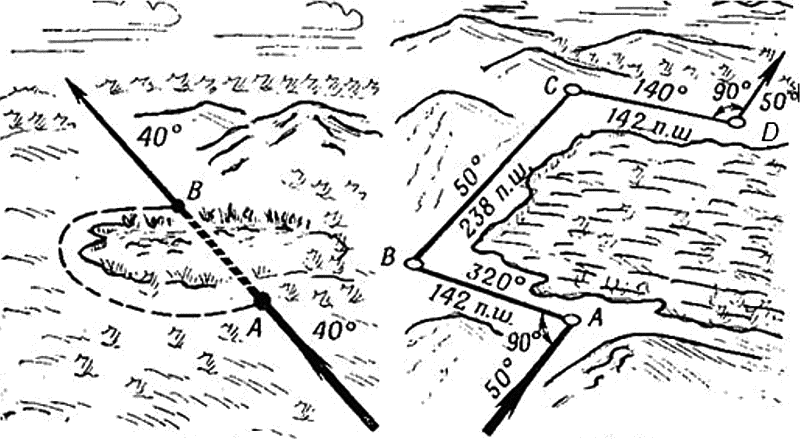
Порядок обхода зависит от размеров и характера препятствия. Рассмотрим конкретный пример. Если противоположная сторона препятствия видна (рис. 15, поз. 1), то в точке А записывают количество пройденных пар шагов. Затем замечают ориентир (точку В) на противоположной стороне препятствия по направлению движения.
Рис. 15 Обход препятствий с сохранением ориентировки (направления движения)
Поз. 1 — противоположная сторона препятствия видна
Поз. 2 — противоположная сторона препятствия не видна
Используя глазомер (или одним из способов, которые будут изложены ниже), определяют расстояние до намеченного ориентира, переводят это расстояние в пары шагов и прибавляют к ранее измеренному по маршруту расстоянию до точки А. После этого обходят препятствие по его границе. В точке В по заданному азимуту находят нужное направление и продолжают движение к очередной точке поворота маршрута.
В некоторых случаях замеченный за препятствием ориентир (точка В) бывает трудно опознать при подходе к нему. Чтобы проконтролировать правильность выхода к ориентиру, в точке А оставляют какую-нибудь заметку, например, ставят веху или делают затес на дереве. При выходе в точку В определяют величину магнитного азимута направления на точку А (обратный азимут), который отличается от азимута заданного направления движения на этом участке маршрута на 180°. Провизировав на точку А по обратному азимуту и убедившись, что это направление точно совпадает с направлением на точку А, продолжают движение.
Если противоположная сторона препятствия не видна, то при выходе в точку А (рис. 15, поз. 2) изучают местность и намечают сторону, по которой легче обойти препятствие. После этого по компасу определяют азимут направления вдоль границы препятствия (320°) и начинают движение, ведя счет парам шагов (142 пш). При этом необходимо строго выдерживать прямолинейность движения.
На левой границе препятствия в точке В (любая точка на местности) делают остановку и определяют направление движения по азимуту, соответствующему направлению основного маршрута (50°). По этому направлению движутся до выхода за препятствие (до точки С). В точке С определяют направление движения, параллельное линии АВ, т. е. обратный азимут направления АВ 140°. Двигаясь по направлению линии СD, отсчитывают количество пар шагов, равное измеренному по линии АВ, т. е. 142 пары шагов.
В точке D определяют по азимуту направление движения, соответствующее направлению движения до выхода к препятствию (50°); к количеству пар шагов, измеренному до точки А, прибавляют расстояние ВС (238 пар шагов) и продолжают движение к намеченной ранее точке поворота маршрута.
Следует заметить, что помимо 4 основных сторон горизонта — север (С), юг (Ю), запад (З), восток (В) — существуют еще четыре направления, тоже относящихся к основным: северо-восток (СВ), юго-восток (ЮВ), юго-запад (ЮЗ), северо-запад (СЗ). Между ними находятся еще 8 промежуточных направлений: север-северо-восток (ССВ), восток-северо-восток (ВСВ), восток-юго-во сток (ВЮВ), юг-юго-восток (ЮЮВ), юг-юго-запад (ЮЮЗ), запад-юго-запад (ЗЮЗ), запад-северо-запад (ЗСЗ), север-северо-запад (ССЗ).
Движение по азимутам на машинах
В этом случае в качестве ориентиров по маршруту движения надо выбирать такие местные предметы, которые хорошо будут заметны непосредственно из машин: высоты, отдельные рощи, населенные пункты, а также развилки, пересечения и резкие повороты дорог, мосты, переезды через железные дороги и т. п.
Ориентиры целесообразно назначать на удалении 15–20 мин движения (10–15 км). Данные для движения оформляются на схеме, которая по сравнению со схемой для движения в пешем порядке отличается более увеличенными размерами, расстояния между ориентирами подписываются не в шагах, а в километрах. Кроме того, на схеме маршрута целесообразно более подробно показать характер и конфигурацию дорог, примыкающих к маршруту, характерные ориентиры вдоль маршрута и в стороне от него и другие подробности местности, которые могут облегчить ориентирование в пути, не снижая скорости движения.
На исходном пункте маршрута записывают показания спидометра, устанавливают на компасе азимут, намечают в направлении движения вспомогательный ориентир и начинают движение. В пути его правильность сверяется по изображенным на схеме ориентирам, расположенным в стороне от маршрута движения, а также по промежуточным ориентирам. При подъезде к повороту необходимо несколько замедлить скорость движения, опознать ориентир, у которого намечен поворот маршрута, и, если место и направление поворота не вызывают сомнения, сделать поворот и продолжать движение, не останавливая машины. При выезде на новый участок маршрута проверить азимут направления движения по компасу. При этом необходимо учитывать, что при работе в машине показания компаса под влиянием магнитного поля машины могут быть ошибочными, причем ошибки возможны в пределах 10–15°. Поэтому в случае необходимости, чтобы уточнить азимут направления дальнейшего движения, надо выйти из машины и отойти от нее на 30–40 м (рис. 15А).
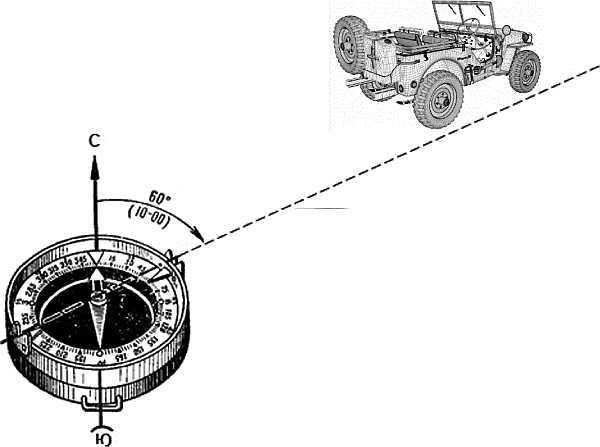
Рис. 15А Определение компасом (Адрианова) магнитного азимута продольной оси машины
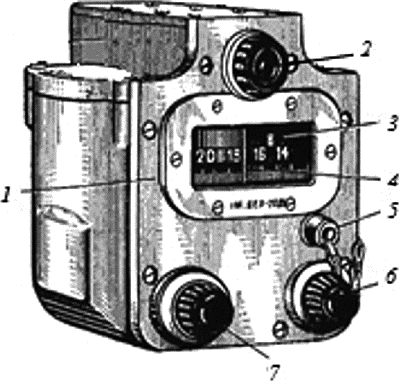
Рис. 16 Гирополукомпас: 1 — лицевая панель (плата); 2 — лампочка подсветки; 3 — указатель отсчета; 4 — курсовая шкала; 5 — пробка регулировочного отверстия; 6 — отвертка; 7 — рукоятка управления арретиром и механизм установки курса
Этого недостатка — зависимости от магнитного поля машины — лишен гирополукомпас (рис. 16). Этот прибор также не подвержен влиянию магнитного поля Земли и устойчиво работает в районах любых магнитных аномалий. В нем использовано свойство быстро вращающегося волчка — сохранять неизменным направление оси вращения в пространстве. При его использовании ориентирование машины на исходной точке маршрута включает определение магнитного азимута (дирекционного угла) направления продольной оси машины и установку этого угла на курсовой шкале гирополукомпаса. Первоначальное ориентирование может выполняться по магнитному азимуту, линейному ориентиру или направлению на удаленный ориентир и по Полярной звезде.
По магнитному азимуту машину ориентируют, когда с исходной точки не видно ориентиров. На расстоянии 40–50 м от нее определяют компасом поочередно магнитные азимуты направлений вдоль ее бортов (см. рис. 15А). За окончательную величину принимают среднее значение из двух измерений. Полученный магнитный азимут продольной оси машины устанавливают на курсовой шкале прибора при включенном гирополукомпасе. После этого машину поворачивают так, чтобы указатель отсчета встал на шкале против значения азимута направления движения на первом звене маршрута.