Наверное, создание вертолетной РЛС – одна из главных на сегодня самостоятельных работ ГРПЗ, по которой ваше предприятие выступает уже не только как серийный завод, но и как полноценный разработчик. А как эта работа начиналась?
Техническое задание на разработку РЛС для боевого вертолета сначала было выдано одному из московских предприятий, которое было определено ее головным разработчиком. Эти работы шли в 90-х гг. Был выпущен комплект конструкторской документации для изготовления опытных образцов. Заводом-изготовителем был выбран ГРПЗ. К 2002 г. мы изготовили основные блоки на два комплекта опытных образцов станции. Конструктивно станция представляла собой цифровой радиолокатор с приемо-передающими модулями (ППМ) двух диапазонов. Однако к тому времени коллектив разработчиков стал распадаться, его покинул главный конструктор, а потом и часть ведущих сотрудников. Кроме того, не были готовы ППМ, задание на разработку которых выполняло другое предприятие-смежник. Не было создано и функциональное программное обеспечение станции. Работа встала…
И вам пришлось самим браться за исправление положения?
Да. Перед заказчиком и разработчиками вертолета (МВЗ им. М.Л. Миля) встал вопрос – как быть дальше. Нам предложили «подхватить» эту тему в 2003 г. Это было трудное решение. Ведь на заводе существовало только серийное КБ, которое вело лишь постановку и сопровождение серийного производства изделий сторонних разработчиков. Тем не менее, в июне 2004 г. договор с МВЗ им. М.Л. Миля о проведении дальнейших работ по РЛС для Ми-28Н на ГРПЗ был подписан. Завод получил в свое распоряжение весь задел и конструкторскую документацию по РЛС. Был проведен ряд консультаций и совещаний с ведущими НИИ по разработке РЛС, проанализирован проект и принято решение о том, что в существующем виде работы по РЛС продолжать нельзя.
Поскольку создание ППМ провалилось, да и программное обеспечение тоже не было разработано, пришлось вместо цифрового локатора разработать «с чистого листа» новую импульсно-доплеровскую РЛС, опыт работ по которым на ГРПЗ был, хотя бы в области освоения серийного производства. Так ГРПЗ стал превращаться из серийного предприятия еще и в разработчика. Вертолетная РЛС была создана силами конструкторского коллектива завода в короткие сроки, от этапа разработки конструкторской документации и до подготовки производства. Для этого пришлось создать в комплексном радиотехническом отделе Научно-технического центра ГРПЗ (НТЦ) два конструкторских бюро: одно – по разработке РЛС, другое – по разработке функционального программного обеспечения РЛС.
Вертолетная РЛС на стенде ГРПЗ
Как шла разработка вертолетной РЛС?
По этапам, какполагается. Выбрали конструктивную схему, разработали документацию. Сделали все сами. Функциональное программное обеспечение РЛС, антенна, бортовой вычислительный комплекс, выходной усилитель мощности миллиметрового диапазона, источники питания для РЛС – все это разрабатывалось специалистами НТЦ завода. Параллельно писали программное обеспечение, готовили стендовую базу для отработки станции, отрабатывали технологию.
Надо сказать, единственное, что нам пришлось на первых порах использовать из полученных от первого предприятия- разработчика заделов – трехосный подвес для размещения аппаратуры РЛС на вертолете. Именно на таком подвесе мы и установили первый экспериментальный образец на опытном вертолете. Этот подвес еще не полностью соответствовал техтребованиям по массе (на нем размещалось 18 кг аппаратуры вместо 8 кг) и некоторым параметрам (скорость сканирования пространства была не 90°/с, а втрое меньше). Но по согласованию с МВЗ для форсирования работ этот образец был установлен на борту вертолета.
Когда же ваш радар впервые поднялся в воздух?
16 февраля 2007 г. впервые в отечественной практике надвтулочная РЛС была поднята в воздух на опытном вертолете Ми-28Н. Испытание прошло в режиме висения на высоте 8 м. Решались серьезные задачи. Прежде всего, это определение реальных механических воздействий на модуль РЛС, который размещен над втулкой несущего винта. Было проверено функционирование РЛС в условиях реального полета (висения). Ну и главное, что сулило проблемы, – влияние лопастей несущего винта вертолета на качество радиолокационного изображения местности. Ведь лопасти в полете всегда находятся в зоне прохождения луча. Однако это оказалось решаемо. Из 10 миллисекунд, затрачиваемых на накопление информации, всего 1 мс лопасть мешает лучу. Это незначительно снижает потенциал станции, но на решение задач не влияет.
Таким образом, первые летные испытания были вполне удачны. А как развивались работы дальше? Какие задачи может решать разработанная вами РЛС?
Да, результаты работы РЛС на вертолете были признаны положительными. На их основе была доработана конструкторская документация и изготовлены три опытных образца РЛС.
Разрабатываемая нами вертолетная РЛС предназначена для:
– картографирования земной поверхности;
– обнаружения подвижных и неподвижных наземных целей;
– измерения координат целей;
– обеспечения безопасности полета (обнаружение опасных для полета препятствий, в т.ч. проводов и опор ЛЭП);
– обнаружения воздушных целей;
– обнаружения опасных для полета метеообразований, их интенсивности и измерения дальности до них.
Антенна РЛС имеет стабилизацию по крену, тангажу и азимуту, что позволяет сохранять постоянные характеристики обнаружения целей и размеры сектора обзора при маневрировании носителя.
По своему назначению РЛС относится к навигационной пилотажной системе вертолета и является, по сути, информационной системой. С нашим изделием вертолет будет иметь тактическое преимущество – он может спрятаться, например, за складками рельефа местности и оказаться недоступным для визуального наблюдения со стороны противника, а экипаж с помощью РЛС при этом будет получать радиолокационное изображение местности. РЛС поможет ориентироваться летчику в отсутствии визуальной видимости, повысит безопасность полета, предупреждая экипаж о наличии по курсу полета опасных препятствий, в т.ч. проводов и опор ЛЭП, в любое время суток и при любой погоде.
Особенностью РЛС является то, что антенна, приемо-передающее устройство и многофункциональный задающий генератор размещены под радиопрозрачным обтекателем и объединены в модуль, который размещен над втулкой несущего винта вертолета. В фюзеляже расположены бортовой вычислительный комплекс, контейнер управления приводами и источник питания. Бортовой вычислительный комплекс (БВК) включает в свой состав модуль аналогового сигнала, модуль аналого-цифрового преобразователя, синхронизатор РЛС, модули обработки сигнала и управления.
Отработка РЛС ФГУП «ГРПЗ» на вертолете Ми-28Н
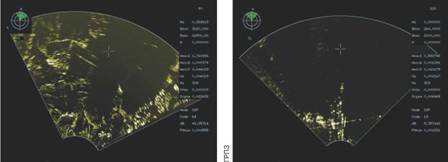
Изображения земной поверхности, полученные с помощью вертолетной РЛС в ходе наземных испытаний: наземные цели (слева) и провода ЛЭП (справа)
Сегодня мы работаем по доведению массы станции до требуемых значений. Изготовлен новый трехосный подвес собственной конструкции. С помощью кабинного индикатора на радиолокационном изображении местности площадью до 400 км 2 в секторе 90°, которое считывается всего лишь за 1,2 с, летчик может видеть подвижные наземные цели, степень угрозы и направление их движения. Информацию за такое время и на такой площади не может получить ни одна из информационных систем вертолета. Полученное изображение земной поверхности (см. фото) может быть использовано экипажем для целеуказания бортовым оптико-электронным системам, у которых гораздо меньшее поле зрения, чем у РЛС. Таким образом, сократится время поиска и уничтожения целей. Вместе с тем, экипаж в воздухе может назначить зону поиска другим вертолетам, что, несомненно, приведет к сокращению ими времени поиска целей и повысит эффективность применения бортового оружия. В режиме селекции движущихся целей на индикаторе летчика останутся только подвижные цели, что сократит время их поиска. РЛС также обеспечит обнаружение воздушных целей.