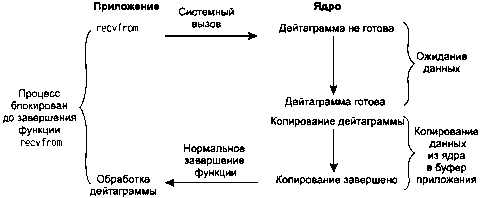
Рис. 6.1. Модель блокируемого ввода-вывода
В этом примере вместо TCP мы используем UDP, поскольку в случае UDP признак готовности данных очень прост: получена вся дейтаграмма или нет. В случае TCP он становится сложнее, поскольку приходится учитывать дополнительные переменные, например минимальный объем данных в сокете (low water-mark).
В примерах этого раздела мы говорим о функции
recvfrom
как о системном вызове, поскольку делаем различие между нашим приложением и ядром. Вне зависимости от того, как реализована функция
recvfrom
(как системный вызов в ядре, происходящем от Беркли, или как функция, активизирующая системный вызов
getmsg
в ядре System V), она обычно выполняет переключение между работой в режиме приложения и работой в режиме ядра, за которым через определенный промежуток времени следует возвращение в режим приложения.
На рис. 6.1 процесс вызывает функцию
recvfrom
, и системный вызов не возвращает управление, пока дейтаграмма не придет и не будет скопирована в буфер приложения либо пока не произойдет ошибка. Наиболее типичная ошибка — это прерывание системного вызова сигналом, о чем рассказывалось в разделе 5.9. Процесс блокирован в течение всего времени с момента, когда он вызывает функцию
recvfrom
, до момента, когда эта функция завершается. Когда функция
recvfrom
выполняется нормально, наше приложение обрабатывает дейтаграмму.
Модель неблокируемого ввода-вывода
Когда мы определяем сокет как неблокируемый, мы тем самым сообщаем ядру следующее: «когда запрашиваемая нами операция ввода-вывода не может быть завершена без перевода процесса в состояние ожидания, следует не переводить процесс в состояние ожидания, а возвратить ошибку». Неблокируемый ввод-вывод мы описываем подробно в главе 16, а на рис. 6.2 лишь демонстрируем его свойства.
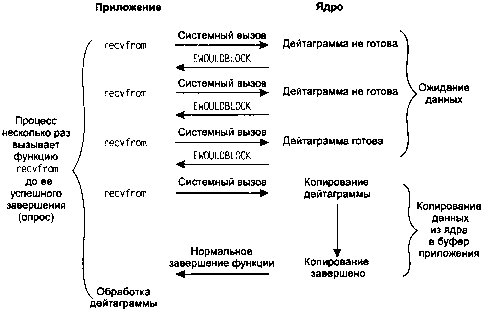
Рис. 6.2. Модель неблокируемого ввода-вывода
В первых трех случаях вызова функции
recvfrom
данных для возвращения нет, поэтому ядро немедленно возвращает ошибку
EWOULDBLOCK
. Когда мы в четвертый раз вызываем функцию
recvfrom
, дейтаграмма готова, поэтому она копируется в буфер приложения и функция
recvfrom
успешно завершается. Затем мы обрабатываем данные.
Такой процесс, когда приложение находится в цикле и вызывает функцию
recvfrom
на неблокируемом дескрипторе, называется
опросом (
polling). Приложение последовательно опрашивает ядро, чтобы увидеть, что какая-то операция может быть выполнена. Часто это пустая трата времени процессора, но такая модель все же иногда используется, обычно в специализированных системах.
Модель мультиплексирования ввода-вывода
В случае мультиплексирования ввода-вывода мы вызываем функцию
select
или
poll
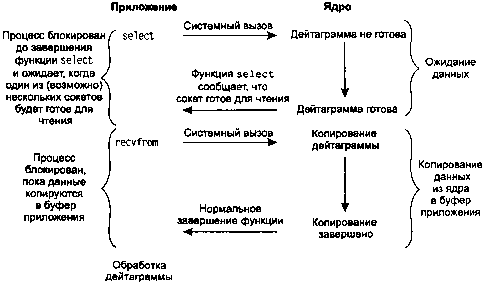
, и блокирование происходит в одном из этих двух системных вызовов, а не в действительном системном вызове ввода-вывода. На рис. 6.3 обобщается модель мультиплексирования ввода-вывода.
Рис. 6.3. Модель мультиплексирования ввода-вывода
Процесс блокируется в вызове функции
select
, ожидая, когда дейтаграммный сокет будет готов для чтения. Когда функция
select
возвращает сообщение, что сокет готов для чтения, процесс вызывает функцию
recvfrom
, чтобы скопировать дейтаграмму в буфер приложения.
Сравнивая рис. 6.3 и 6.1, мы не найдем в модели мультиплексирования ввода- вывода каких-либо преимуществ, более того, она даже обладает незначительным недостатком, поскольку использование функции
select
требует двух системных вызовов вместо одного. Но преимущество использования функции
select
, которое мы увидим далее в этой главе, состоит в том, что мы сможем ожидать готовности не одного дескриптора, а нескольких.
ПРИМЕЧАНИЕ
Разновидностью данного способа мультиплексирования является многопоточное программирование с блокируемым вводом-выводом. Отличие состоит в том, что вместо вызова select с блокированием программа использует несколько потоков (по одному на каждый дескриптор), которые могут блокироваться в вызовах типа recvfrom.
Модель ввода-вывода, управляемого сигналом
Мы можем сообщить ядру, что необходимо уведомить процесс о готовности дескриптора с помощью сигнала
SIGIO
. Такая модель имеет название
ввод-вывод, управляемый сигналом (
signal-driven I/O). Она представлена в обобщенном виде на рис. 6.4.
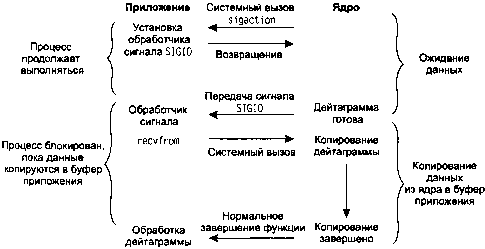
Рис. 6.4. Модель управляемого сигналом ввода-вывода
Сначала мы включаем на сокете управляемый сигналом ввод-вывод (об этом рассказывается в разделе 22.2) и устанавливаем обработчик сигнала при помощи системного вызова
sigaction
. Возвращение из этого системного вызова происходит незамедлительно, и наш процесс продолжается (он не блокирован). Когда дейтаграмма готова для чтения, для нашего процесса генерируется сигнал
SIGIO
. Мы можем либо прочитать дейтаграмму из обработчика сигнала с помощью вызова функции
recvfrom
и затем уведомить главный цикл о том, что данные готовы для обработки (см. раздел 22.3), либо уведомить основной цикл и позволить ему прочитать дейтаграмму.
Независимо от способа обработки сигнала эта модель имеет то преимущество, что во время ожидания дейтаграммы не происходит блокирования. Основной цикл может продолжать выполнение, ожидая уведомления от обработчика сигнала о том, что данные готовы для обработки либо дейтаграмма готова для чтения.
Модель асинхронного ввода-вывода
Асинхронный ввод-вывод был введен в редакции стандарта POSIX.1g 1993 г. (расширения реального времени). Мы сообщаем ядру, что нужно начать операцию и уведомить нас о том, когда вся операция (включая копирование данных из ядра в наш буфер) завершится. Мы не обсуждаем эту модель в этой книге, поскольку она еще не получила достаточного распространения. Ее основное отличие от модели ввода-вывода, управляемого сигналом, заключается в том, что при использовании сигналов ядро сообщает нам, когда операция ввода-вывода может быть инициирована, а в случае асинхронного ввода-вывода — когда операция завершается. Пример этой модели приведен на рис. 6.5.
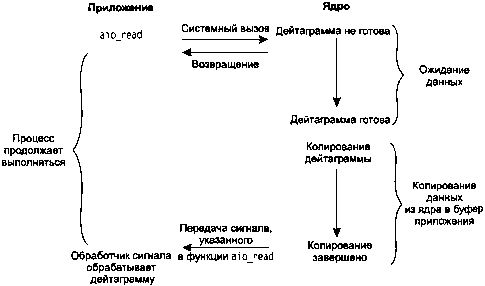
Рис. 6.5. Модель асинхронного ввода-вывода
Мы вызываем функцию
aio_read
(функции асинхронного ввода-вывода POSIX начинаются с
aio_
или
lio_
) и передаем ядру дескриптор, указатель на буфер, размер буфера (те же три аргумента, что и для функции read), смещение файла (аналогично функции
lseek
), а также указываем, как уведомить нас, когда операция полностью завершится. Этот системный вызов завершается немедленно, и наш процесс не блокируется в ожидании завершения ввода-вывода. В этом примере предполагается, что мы указали ядру сгенерировать некий сигнал, когда операция завершится. Сигнал не генерируется до тех пор, пока данные не скопированы в наш буфер приложения, что отличает эту модель от модели ввода-вывода, управляемого сигналом.