Основа беспилотника – винтокрыл-трансформер
В инновационном инженерном центре ОАО «МВЗ им. М.Л. Миля» в рамках программы формирования научно-технического задела начаты поисковые проектно-конструкторские работы и расчетный анализ нескольких новых конструктивных схем перспективных пилотируемых и беспилотных аппаратов вертикального взлета и посадки. В этой статье речь идет о концепции беспилотного авиационного комплекса на основе летательного аппарата-трансформера, выполненного по схеме «летающее крыло». Это крыло при выполнении режимов вертикального полета (висения, взлета и посадки) реконфигурируется в двухлопастный воздушный винт.
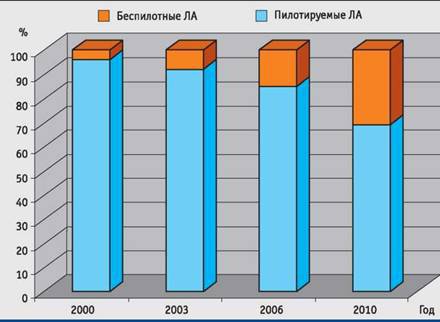
Исследования состояния и тенденций развития мирового рынка гражданской и военной авиации свидетельствуют об устойчивом росте доли беспилотных летательных аппаратов в общем объеме финансирования новых разработок.
Развитие беспилотных авиационных систем оказывает все большее влияние и на развитие пилотируемых летательных аппаратов – самолетов и вертолетов. В отчете по результатам анализа мирового рынка винтокрылых летательных аппаратов и перспектив его развития, выполненного Teal Group Corporation в 2009 году, утверждается, что «…проект создания легкого разведывательного вертолета Comanche может рассматриваться как первая серьезная жертва конкуренции с ударными БПЛА». Известно, что программа создания такого вертолета была закрыта несмотря на весьма значительные потраченные на нее средства и успешное, с технической точки зрения, развитие. Главная причина закрытия программы в том, что выполнение задач мониторинга, разведки и целеуказания с помощью беспилотных летательных аппаратов в единых сетевых комплексах с пилотируемыми самолетами и вертолетами является более дешевым и эффективным.
ВМС США в течение ближайших десяти лет планируют разработать и построить с применением стелс-технологии палубный ударный и разведывательный беспилотный летательный аппарат (UCLASS), который будет базироваться на авианосцах.
В настоящее время определился круг задач, для выполнения которых необходимы беспилотные летательные аппараты вертикального взлета и посадки, позволяющие отказаться от аэродромов. Беспилотные летательные аппараты могут применяться с кораблей малой и средней размерностей, в горных или городских условиях. При этом к беспилотникам предъявляются такие требования по скорости, продолжительности и дальности полета, выполнить которые невозможно в рамках классических вариантов компоновки. Так, например, в соответствии с документом министерства обороны США «Схематический прогноз по беспилотным летательным аппаратам на 2000-2025 годы» беспилотные вертолеты будущего должны удовлетворять таким основным требованиям:
– иметь возможность полета на высоких скоростях (400 узлов и выше) или полета продолжительностью 24 часа и более с сохранением возможности зависания;
– быть бесшумными (это достижимо при использовании в силовых установках топливных элементов);
– быть малозаметными в радио- и инфракрасном диапазоне;
– иметь повышенную живучесть и способность к самовосстановлению конструкции и компенсации повреждений;
– иметь каналы связи с повышенной устойчивостью к помехам;
– быть приемлемыми по стоимости жизненного цикла.
Рис. 1. Уровни финансирования проектов пилотируемых и беспилотных летательных аппаратов в США
Перечисленные требования были использованы в качестве базовых при формировании и обосновании концепции анонсируемого в статье перспективного беспилотного авиационного комплекса на основе скоростного винтокрыла-трансформера.
Назовем отличительные признаки такого беспилотного авиационного комплекса. Прежде всего, беспилотный летательный аппарат, составляющий основу комплекса, имеет самолетную компоновку типа «летающее крыло». Консоли крыла выполнены с возможностью их поворота вокруг шарообразного центроплана навстречу друг другу на 180° относительно продольной оси крыла. Это позволяет реконфигурировать «летающее крыло» летательного аппарата в двухлопастный воздушный винт для выполнения взлета, висения и посадки. На консолях крыла установлены движители, или воздушные винты с приводом от двигателей (электрических, поршневых, газотурбинных), возможна установка реактивных движителей.
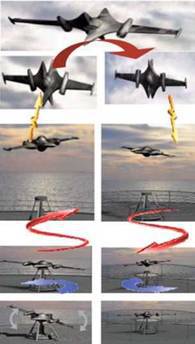
Вертикальный старт беспилотного летательного аппарата выполняется с мобильной платформы, на которой размещено стартовое устройство. Оно обеспечивает предполетную коррекцию пространственного положения беспилотного летательного аппарата и его раскрутку (за счет наземной энергоустановки) для «прыжкового» взлета, аналогичного взлету автожиров.
Для обеспечения набора высоты, по мере исчерпания накопленной при наземной раскрутке кинетической энергии могут использоваться штатные движители беспилотного летательного аппарата.
Рис. 2. Схема вертикального взлета беспилотного летательного аппарата
Для выполнения аппаратом посадки по- вертолетному или зависания над точкой используется специальный маневр в вертикальной плоскости с реконфигурацией «летающего крыла» в воздушный винт. Этот винт раскручивается за счет установленных на консолях движителей, а также за счет авторотации при снижении. Предусматривается также возможность парашютного приземления.
У беспилотного авиационного комплекса на основе скоростного винтокрыла-трансформера есть важные конкурентные преимущества перед пилотируемыми летательными аппаратами. Самолетная конфигурация трансформера позволяет на режимах горизонтального полета обеспечить скорость, дальность и продолжительность полета, достигаемые на аппаратах самолетного типа. Вертикальный взлет трансформера за счет наземной энергоустановки дает возможность существенно снизить массу конструкции БЛА, увеличить запас топлива и массу полезной нагрузки, а также «избавиться» от трансмиссии вертолетного типа. В трансформере реализуется не имеющее в мировой практике аналогов сочетание эксплуатационных свойств и летно-технических характеристик трансформера, достигаемое за счет вертикального старта с помощью наземной энергоустановки и реконфигурации в самолет для горизонтального полета.
Перечисленные выше конкурентные преимущества беспилотного авиационного комплекса, созданного на основе скоростного винтокрыла-трансформера, позволяют говорить о создании прорывного продукта и образовании нового летательного аппарата на рынке беспилотных летательных аппаратов.
Станислав МИДЗЯНОВСКИЙ, Инновационный инженерный центр МВЗ им. М.Л. Миля
За крушение вертолета ответили сборщик и контролеры
Не прошло и двух лет со дня катастрофы вертолета Ми-8МТВ под Казанью, как состоялся суд над обвиняемыми. Это дело рассматривалось в суде за закрытыми дверями, в зал никого не пускали, кроме родственников погибших. Исключение сделали лишь на оглашении приговора. Напомним обстоятельства произошедшего.
В расположении поселка Новая Тура, что в 15 км от Казани, 26 октября 2008 года потерпел катастрофу вертолет Ми-8МТВ. На его борту находился экипаж в составе: командир вертолета летчик-испытатель КВЗ Петр Чумаков, второй пилот Ринат Галимов, штурман Борис Макаренко, бортинженер Фарид Хуснимарданов, ведущий инженер Максим Иванков. Вертолет летел в испытательную зону по «выходному» коридору. Погода была хорошей.
Вдруг над поселком с вертолетом что-то произошло, он стал крениться и падать. До столкновения с землей второй пилот успел выпрыгнуть в сорванный блистер и раскрыть парашют. Парашют полностью не раскрылся, но летчик остался жив, хотя и получил серьезные травмы. Остальные члены экипажа погибли. Вертолет разрушился и частично сгорел.
Техническая комиссия, расследовавшая катастрофу, очень быстро нашла ее причину. Катастрофа произошла из-за рассоединения системы поперечного управления (по крену). Выпал болт, соединявший тягу и качалку, так как был установлен с грубейшими нарушениями требований чертежа и технологии: головкой вниз, без гайки, шайбы и контровки.