Один из вариантов – разумно подбирать примеры для обучения. Для одного обеда купим один бургер, для второго – одну порцию картошки, для третьего – один стакан газировки. В целом разумный подбор примеров – хорошая идея. Многие исследования показывают, что, создав хорошую подборку данных для обучения, вы сможете заметно повысить эффективность нейросети. Но проблема использования только этого подхода в том, что в реальных ситуациях он редко приближает нас к решению. Например, при распознавании изображений аналога ему нет и решения мы не найдем.
Нам нужно найти вариант, который поможет решать задачу в общем случае. Допустим, у нас очень большой набор обучающих примеров. Это позволит нам вычислить, какие выходные значения выдаст нейросеть на i-м примере, при помощи простой формулы. Мы хотим обучить нейрон и подбираем оптимальные веса, чтобы свести к минимуму ошибки при распознавании примеров. Можно сказать, мы хотим свести к минимуму квадратичную ошибку во всех примерах, которые встретим. Формально, если мы знаем, что t(i) – верный ответ на i-й пример, а y(i) – значение, вычисленное нейросетью, мы хотим свести к минимуму значение функции потерь E:
Квадратичная ошибка равна 0, когда модель дает корректные предсказания для каждого обучающего примера. Более того, чем ближе E к 0, тем лучше модель. Наша цель – выбрать такой вектор параметров θ (значения всех весов в этой модели), чтобы E было как можно ближе к 0.
Вы, возможно, недоумеваете: зачем утруждать себя функцией потерь, если проблему легко решить с помощью системы уравнений. В конце концов, у нас есть наборы неизвестных (весов) и уравнений (одно для каждого примера). Это автоматически даст нам ошибку, равную 0, если обучающие примеры подобраны удачно.
Хорошее замечание, но, к сожалению, актуальное не для всех случаев. Мы применяем здесь линейный нейрон, но на практике они используются редко, ведь их способности к обучению ограничены. А когда мы начинаем использовать нелинейные нейроны – сигмоиду, tanh или усеченный линейный, о которых мы говорили в конце предыдущей главы, – мы не можем задать систему уравнений! Так что для обучения явно нужна стратегия получше[9].
Градиентный спуск
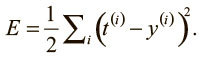
Визуализируем для упрощенного случая то, как свести к минимуму квадратичную ошибку по всем обучающим примерам. Допустим, у линейного нейрона есть только два входа (и соответственно только два веса – w1 и w2). Мы можем представить себе трехмерное пространство, в котором горизонтальные измерения соответствуют w1 и w2, а вертикальное – значению функции потерь E. В нем точки на горизонтальной поверхности сопоставлены разным значениям весов, а высота в них – допущенной ошибке. Если рассмотреть все ошибки для всех возможных весов, мы получим в этом трехмерном пространстве фигуру, напоминающую миску (рис. 2.2).
Рис. 2.2. Квадратичная поверхность ошибки для линейного нейрона
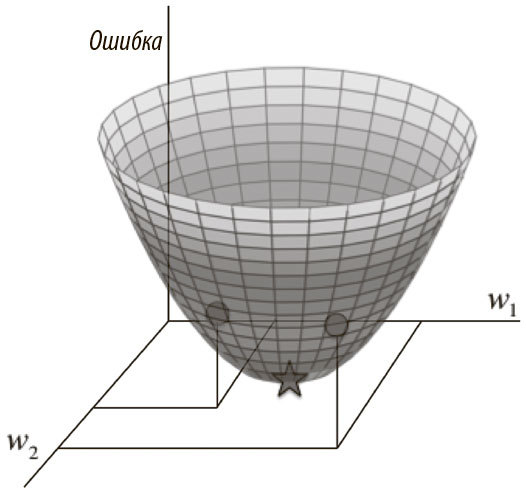
Эту поверхность удобно визуализировать как набор эллиптических контуров, где минимальная ошибка расположена в центре эллипсов. Тогда мы будем работать с двумерным пространством, где измерения соответствуют весам. Контуры сопоставлены значениям w1 и w2, которые дают одно и то же E. Чем ближе они друг к другу, тем круче уклон. Направление самого крутого уклона всегда перпендикулярно контурам. Его можно выразить в виде вектора, называемого градиентом.
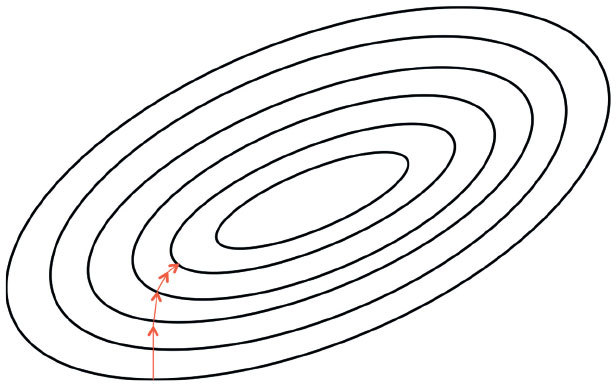
Пора разработать высокоуровневую стратегию нахождения значений весов, которые сведут к минимуму функцию потерь. Допустим, мы случайным образом инициализируем веса сети, оказавшись где-то на горизонтальной поверхности. Оценив градиент в текущей позиции, мы можем найти направление самого крутого спуска и сделать шаг в нем. Теперь мы на новой позиции, которая ближе к минимуму, чем предыдущая. Мы проводим переоценку направления самого крутого спуска, взяв градиент, и делаем шаг в новом направлении. Как показано на рис. 2.3, следование этой стратегии со временем приведет нас к точке минимальной ошибки. Этот алгоритм известен как градиентный спуск, и мы будем использовать его для решения проблемы обучения отдельных нейронов и целых сетей[10].
Рис. 2.3. Визуализация поверхности ошибок как набора контуров
Дельта-правило и темп обучения
Прежде чем вывести точный алгоритм обучения фастфудного нейрона, поговорим о гиперпараметрах. Помимо весов, определенных в нашей нейросети, обучающим алгоритмам нужен ряд дополнительных параметров. Один из этих гиперпараметров – темп обучения.
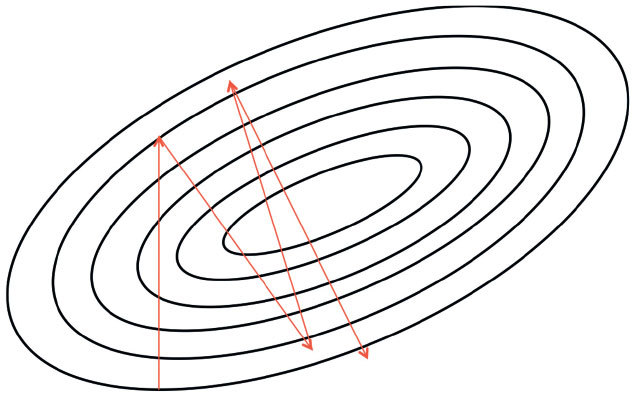
На каждом шаге движения перпендикулярно контуру нам нужно решать, как далеко мы хотим зайти, прежде чем заново вычислять направление. Это расстояние зависит от крутизны поверхности. Почему? Чем ближе мы к минимуму, тем короче должны быть шаги. Мы понимаем, что близки к минимуму, поскольку поверхность намного более плоская и крутизну мы используем как индикатор степени близости к этому минимуму. Но если поверхность ошибки рыхлая, процесс может занять много времени. Поэтому часто стоит умножить градиент на масштабирующий коэффициент – темп обучения. Его выбор – сложная задача (рис. 2.4).
Рис. 2.4. Если темп обучения слишком велик, возникают проблемы со сходимостью
Как мы уже говорили, если он будет слишком мал, возможно, процесс займет слишком много времени. Но если темп будет слишком высоким, то кончится это, скорее всего, тем, что мы отклонимся от минимума. В главе 4 мы поговорим о методах оптимизации, в которых используются адаптивные темпы обучения для автоматизации выбора.
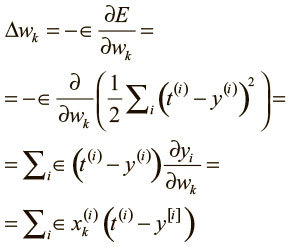
Теперь мы готовы вывести дельта-правило для обучения линейного нейрона. Чтобы вычислить, как изменять каждый вес, мы оцениваем градиент: по сути, частную производную функции потерь по каждому из весов. Иными словами, нам нужен такой результат:
Применяя этот метод изменения весов при каждой итерации, мы получаем возможность использовать градиентный спуск.
Градиентный спуск с сигмоидными нейронами
В этом и следующем разделах мы будем говорить об обучении нейронов и нейросетей, использующих нелинейности. В качестве образца возьмем сигмоидный нейрон, а расчеты для других нелинейных нейронов оставим читателям как упражнение. Для простоты предположим, что нейроны не используют смещение, хотя наш анализ вполне можно распространить и на такой случай. Допустим, смещение – вес входа, на который всегда подается 1.
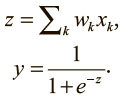
Напомним механизм, с помощью которого логистические нейроны вычисляют выходные значения на основе входных:
Нейрон определяет взвешенную сумму входящих значений – логит z. Затем он передает этот логит в нелинейную функцию для вычисления выходного значения y. К счастью для нас, эти функции имеют очень красивые производные, что значительно упрощает дело! Для обучения нужно вычислить градиент функции потерь по весам. Возьмем производную логита по входным значениям и весам: