Во время тренировок на лунодроме мы отработали множество операций: водили луноход «змейкой», проходили «коридор», распознавали различные препятствия.
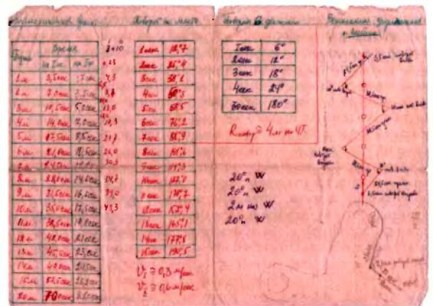
У меня сохранилась персональная «шпаргалка», которая отражала параметры движения машины 108А (проходимый путь на первой и второй скорости, угловые величины поворотов на месте и в движении) в зависимости от времени, а также упражнение «Змейка» и одна из тестовых трасс.
Рис. 42. «Шпаргалка»
На персональных формализованных бланках, разработанных ЛН. Поляковым, результаты регистрировались и сравнивались с фактическими данными.
Рис. 43. Бланк Протокола №5 для вешированных трасс
На пульте водителя ДУ-001 располагались органы управления и информационные приборы. Центральное место занимал телевизионный экран с диагональю 35 см, на который по рационализаторскому предложению водителей наложили прозрачную плёнку. На ней было изображение двух прямых чёрного цвета, исходящих из нижних крайних точек экрана и сходящихся в центре на линии горизонта лунной поверхности и космоса при нулевых значениях крена и дифферента. Эти прямые показывали, где пройдут колёса левого и правого бортов лунохода. Сетка была создана для центральной и боковой курсовых телекамер. Такие же сетки использовались и на ВКУ пульта командира экипажа.
Обычно до 8-9 м местность просматривалась хорошо в том случае, если линия горизонта проходила посредине экрана, т.е. при нулевых значениях углов дифферента и крена, а далее детали сливались и оценка обстановки затруднялась. Поэтому эти прямые соединили горизонтальными линиями с отметками «2», «4», «6» и «8», соответствующим расстояниям в метрах от места стоянки лунохода. Это позволяло водителю оперативно оценивать обстановку по ходу движения и принимать правильное решение.
Слева от ВКУ - стрелочные приборы «Дифферент», «Крен», «Курс» и «Путь», которые информируют водителя о величинах углов подъёма (спуска) и наклонов шасси лунохода, направлении его движения и пройденном им пути.
Направление движения лунохода определялось наклоном рукоятки (штурвала), которая имела пятнадцать фиксированных положений. Изменение положения рукоятки было подготовкой к выполнению команды на исполнение, а сама радиокоманда уходила на борт лунохода лишь при нажатии кнопки, находящейся в торце рукоятки. При установке рукоятки «от себя» в первое фиксированное положение («Вперёд-1») - луноход двигался вперёд на первой скорости (0,33 м/с), во второе («2-я скорость») - на второй скорости (0,66 м/с). При установке «на себя» в первое фиксированное положение («Назад») - движение назад на первой скорости. Поворот лунохода, как на месте, так и во время движения достигался смещением рукоятки «Налево» или «Направо» из того фиксированного положения, в котором она находилась. Для прекращения движения лунохода, рукоятку нужно было вернуть из любого положения в нейтральное (исходное) - «Стоп».
На горизонтальной панели находились кнопки, которые служили только для фиксированного поворота лунохода на месте. Одна из них - «Поворот 1» (5°), а другая - «Поворот 2» (20°). Направление поворота - в зависимости от положения рукоятки «Налево» или «Направо».
Ещё три кнопки: «9 колесо» (перед началом движения вперёд колесо опускалось на грунт по команде «Опустить» и поднималось - перед началом движения назад или поворотах на месте по команде «Поднять»); «Задержка» - включение и выключение старт-стопного режима движения на определённый временной интервал; «Проба грунта» - включение прибора определения проходимости (ПрОП) для оценки физико-механических свойств лунного грунта.
Также на этой панели располагались кнопки для дублирования выдачи команд в режиме движения лунохода в случае неисправности рукоятки (штурвала). При управлении лунохода с применением штурвала кнопки были закрыты крышкой. Кстати, они так ни разу и не использовались в реальной работе.
Каждая команда, выдаваемая водителем, отображалась на двух световых табло, одна из которых информировала о выдаче именно этой команды, а другая - об исполнении её на борту. Информация об исполнении (т.н. «квитанция») приходила на ПУЛ через 4,1 с. Сопоставляя выводимое на ВКУ изображение участка поверхности с показаниями приборов, водитель докладывал командиру о расстояниях до препятствий (камней, кратеров, расщелин и др.), их форму, размеры. На этом основании он принимал решение о своих дальнейших действиях.
На борту лунохода была установлена система, которая обеспечивала безопасность движения. При достижении предельных величин дифферента или крена бортовая автоматика выдавала команду «Стоп». Команда «Стоп» выдавалась также и при превышении допустимого предела нагрузки на ведущих колёсах. При попадании колеса в расщелину было предусмотрено его отключение (отстрел), что делало его из ведущего ведомым и позволяло остальным колёсам, которые оставались ведущими, продолжать движение.
По особой программе проходили подготовку операторы ОНА (Н. Козлитин, В. Сапранов и В. Чубукин). Ведь от точности их действий зависело качество изображения «лунной» поверхности на телеэкране. Оптимальное положение антенны обеспечивалось выдачей на борт лунохода команд с пульта оператора ОНА (ДУ-002): «Поворот 7,5», «Поворот 15», «Поворот 180», «Направо», «Налево», «Вверх», «Вниз» и «Стоп».
На этом пульте также было ВКУ и, кроме того, индикаторы уровня поля и система отображения углов поворота антенны. Каждая команда, выдаваемая и принимаемая оператором, также отображалась на световых табло по аналогии с пультом ДУ-001.
Большой тренировочный курс прошли командиры (Ю. Васильев и И. Фёдоров), штурманы (К. Давидовский и В. Самаль) и бортинженеры (А. Кожевников и Л. Мосензов).
Пульт командира ДУ-003 обеспечивал восприятие и переработку информации, поступающей с борта лунохода. Командир (как и водитель) имел перед собой приборы, по которым он оценивал положение лунохода по крену и дифференту, направление его движения (курс) и пройденный путь, а по ВКУ опознавал препятствия и определял расстояния до них. На этом основании он принимал решение о дальнейших действиях водителя. Командир мог в любой момент прекратить движение лунохода, выдав распоряжение водителю или оператору КРЛ.
На пульты водителя, оператора ОНА и командира выводилась чёрнобелая фотография («картинка»), которая «стояла» на экране ВКУ в зависимости от выбранного режима: 3,2; 5,7; 10,9 или 21,1 с.
Если «луноход» двигался, то за время такой задержки он мог пройти на первой скорости (0,33 м/с) расстояние от 2,3 до 8,3 м. Вот почему водитель обязан был доложить командиру (этот доклад слышали и все члены экипажа) информацию о появившихся препятствиях на трассе и предложить решение о выборе дальнейшего маршрута.
Приблизительно через 2 с борт лунохода принимал радиокоманду, о чём (ещё приблизительно через 2 с) поступала «квитанция» на пульты водителя, оператора ОНА и командира о принятии бортом и исполнении выданной радиокоманды.
Приобретённые навыки управления позволили водителям оперативно оценивать обстановку в секторе на расстоянии 3-9 м и принимать решение при задержке более 7 с.
Это был странный способ управления, т.к. каждый раз на ВКУ появлялось изображение, которое не было похоже на предыдущее. Об исполнении команды и меняющейся обстановке водитель узнаёт с задержкой, т.е. видит события в прошлом. Поэтому управление на расстоянии требует определённого умения предугадывать события, и водителя лунохода можно сравнить с шахматистом, который обязан предвидеть развитие партии на несколько ходов вперёд. Надо было хорошо вжиться в эту работу, полностью отрешиться от всего земного и вести себя так, словно сам находишься на луноходе. Трудно придумать что-либо похожее в земных условиях, чтобы понять, как чувствует себя водитель лунохода. По крайне мере естественных процессов, похожих на эти, у нас на Земле не происходит. В результате тренировок мы научились «жить в будущем».