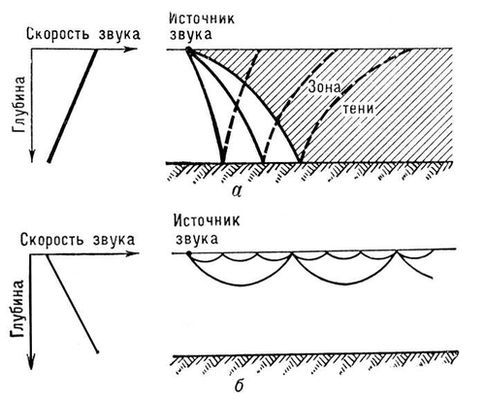
Наличие рефракции, однако, может приводить к увеличению дальности распространения звука — явлению сверхдальнего распространения звуков под водой. На некоторой глубине под поверхностью воды находится слой, в котором звук распространяется с наименьшей скоростью; выше этой глубины скорость звука увеличивается из-за повышения температуры, а ниже — вследствие увеличения гидростатического давления с глубиной. Этот слой представляет собой своеобразный подводный звуковой канал. Луч, отклонившийся от оси канала вверх или вниз, вследствие рефракции всегда стремится попасть в него обратно (рис. 2). Если поместить источник и приёмник звука в этом слое, то даже звуки средней интенсивности (например, взрывы небольших зарядов в 1—2 кг) могут быть зарегистрированы на расстояниях в сотни и тысячи км. Существенное увеличение дальности распространения звука при наличии подводного звукового канала может наблюдаться при расположении источника и приёмника звука не обязательно вблизи оси канала, а, например, у поверхности. В этом случае лучи, рефрагируя книзу, заходят в глубоководные слои, где они отклоняются кверху и выходят снова к поверхности на расстоянии в несколько десятков км от источника. Далее картина распространения лучей повторяется и в результате образуется последовательность т. н. вторичных освещенных зон, которые обычно прослеживаются до расстояний в несколько сотен км. Явление сверхдальнего распространения звука в море было открыто независимо американскими учёными М. Ивингом и Дж. Ворцелем (1944) и советскими учёными Л. М. Бреховских и Л. Д. Розенбергом (1946).
На распространение звуков высокой частоты, в частности ультразвуков, когда длины волн очень малы, оказывают влияние мелкие неоднородности, обычно имеющиеся в естественных водоёмах: микроорганизмы, пузырьки газов и т.д. Эти неоднородности действуют двояким образом: они поглощают и рассеивают энергию звуковых волн. В результате с повышением частоты звуковых колебаний дальность их распространения сокращается. Особенно сильно этот эффект заметен в поверхностном слое воды, где больше всего неоднородностей. Рассеяние звука неоднородностями, а также неровностями поверхности воды и дна вызывает явление подводной реверберации, сопровождающей посылку звукового импульса: звуковые волны, отражаясь от совокупности неоднородностей и сливаясь, дают затягивание звукового импульса, продолжающееся после его окончания, подобно реверберации, наблюдающейся в закрытых помещениях. Подводная реверберация — довольно значительная помеха для ряда практических применений Г., в частности для гидролокации.
Пределы дальности распространения подводных звуков лимитируются ещё и т. н. собственными шумами моря, имеющими двоякое происхождение. Часть шумов возникает от ударов волн на поверхности воды, от морского прибоя, от шума перекатываемой гальки и т.п. Другая часть связана с морской фауной; сюда относятся звуки, производимые рыбами и др. морскими животными (подробнее см. Биогидроакустика).
Г. получила широкое практическое применение, т.к. никакие виды электромагнитных волн, включая и световые, не распространяются в воде (вследствие её электропроводности) на сколько-нибудь значительном расстоянии, и звук поэтому является единственным возможным средством связи под водой. Для этих целей пользуются как звуковыми частотами от 300 до 10000 гц, так и ультразвуками от 10000 гц и выше. В качестве излучателей и приёмников в звуковой области используются электродинамические и пьезоэлектрические излучатели и гидрофоны, а в ультразвуковой — пьезоэлектрические и магнитострикционные. Из наиболее существенных применений Г. следует отметить эхолот, гидролокаторы, которыми пользуются для решения военных задач (поиски подводных лодок противника, бесперископная торпедная атака и т.д.); для мореходных целей (плавание вблизи скал, рифов и др.), рыбопромысловой разведки, поисковых работ и т.д. Пассивным средством подводного наблюдения служит шумопеленгатор, позволяющий определить направление источника шума, например корабельного винта. Подводные мины снабжаются т. н. акустическими замыкателями (взрывателями), вызывающими взрыв заряда мины в момент прохождения над ней корабля. Самодвижущиеся торпеды могут самонаправляться на корабль по его шуму и т.д.
Лит.: Физические основы подводной акустики, пер. с англ., под ред. В. И. Мясищева, М., 1955; Бреховских Л. М., Волны в слоистых средах, М., 1957; Подводная акустика, пер. с англ., под ред. Л. М. Бреховских, т. 1, М., 1965, т. 2, М., 1970: Сташкевич А. П., Акустика моря, Л., 1966: Толстой И., Клей К. С., Акустика океана, пер. с англ., М., 1969.
Л. Д. Розенберг. Р. Ф. Швачко.
Рис. 2. Распространение звука в подводном звуковом канале: а — изменение скорости звука с глубиной; б — ход лучей в звуковом канале.
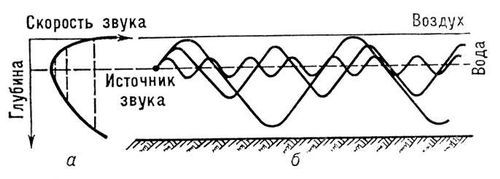
Рис. 1. Рефракция звука в воде: а — летом; б — зимой; слева — изменение скорости с глубиной.
Гидроакустическая станция
Гидроакусти'ческая ста'нция, совокупность схемно и конструктивно связанных акустических, электрических и электронных приборов и устройств, с помощью которых производится приём или излучение либо приём и излучение акустических колебаний в воде.
Различают Г. с. только принимающие акустическую энергию (пассивного действия) и приёмоизлучающие (активного действия). Г. с. пассивного действия [шумопеленгатор (рис. 1, а), Г. с. разведки, звукометрическая станция и др.] служат для обнаружения и определения направления (пеленга) на шумящий объект (движущийся корабль, Г. с. активного действия и др.) по создаваемым объектом акустическим сигналам (шумам), а также для прослушивания, анализа и классификации принятых сигналов. Пассивные Г. с. обладают скрытностью действия: их работу нельзя обнаружить. Г. с. активного действия [гидролокатор (рис. 1, б), рыболокатор, эхолот и др.] применяют для обнаружения, определения направления и расстояния до объекта, полностью или частично погруженного в воду (подводной лодки, надводного корабля, айсберга, косяка рыбы, морского дна и т.д.). Достигается это посылкой кратковременных акустических импульсных сигналов в определённом или во всех направлениях и приёмом (во время паузы между посылками их) после отражения от объекта. Активные Г. с. способны обнаруживать как шумящие, так и не шумящие объекты, движущиеся и неподвижные, но могут быть обнаружены и запеленгованы по излучению, что является некоторым их недостатком. К активным Г. с. также относят станции звукоподводной связи, гидроакустические маяки, гидроакустические лаги, эхолёдомеры и др. акустические станции и приборы. Подробнее о методах пеленгования и определения местоположения см. в ст. Гидроакустика и Гидролокация.
Основными частями пассивных Г. с. являются: акустическая система (антенна), компенсатор, усилитель, индикаторное устройство. Активная Г. с., кроме того, имеет также генератор и коммутационное устройство, или переключатель «приём — передача».
Акустическая система Г. с. составляется из многих электроакустических преобразователей (гидрофонов — у принимающих Г. с., вибраторов — у приёмоизлучающих Г. с.) для создания необходимой характеристики направленности приёма и излучения. Преобразователи размещаются (в зависимости от типа и назначения Г. с.) под днищем корабля на поворотно-выдвижном устройстве или в стационарном обтекателе, проницаемом для акустических колебаний, встраиваются в наружную обшивку корабля, монтируются в буксируемом кораблём или опускаемом с вертолёта контейнере, устанавливаются поверх опорной конструкции на дне моря. Компенсатор вносит в переменные токи, протекающие в электрических цепях разнесённых друг от друга гидрофонов, сдвиг фаз, эквивалентный разности времени прихода акустических колебаний к этим гидрофонам. Численные значения этих сдвигов показывают угол между осью характеристики направленности неподвижной акустических системы и направлением на объект. После усиления электрические сигналы подаются на индикаторное устройство (телефон или электроннолучевую трубку) для фиксирования направления на шумящий объект. Генератор активной Г. с. создаёт кратковременные электрические импульсные сигналы, которые затем излучаются вибраторами в виде акустических колебаний. В паузах между ними отражённые от объектов сигналы принимаются теми же вибраторами, которые на это время присоединяются переключателем «приём—передача» к усилителю электрических колебаний. Расстояние до объектов определяется на индикаторном устройстве по времени запаздывания отражённого сигнала относительно прямого (излучаемого).