Производительность А. л. зависит от времени, затрачиваемого на непосредственное осуществление рабочего процесса, времени на выполнение вспомогательных перемещений (несовмещенные транспортные операции, закрепление и открепление обрабатываемого изделия, отвод и подвод рабочих органов), времени на переналадку, наладку и восстановление работоспособности линии. Сокращение времени рабочего процесса достигается применением высокопроизводительной технологии. Уменьшение времени на вспомогательные перемещения достигается сокращением числа холостых перемещений или увеличением их скорости, совмещением во времени холостых перемещений с рабочим процессом. Для оценки производительности А. л. важен показатель цикловой непрерывности работы, который определяется (для дискретных процессов) отношением времени выполнения рабочего процесса к общему времени цикла. Время на подналадку, переналадку и ремонт сокращается при использовании автоматического регулирования, повышении стабильности рабочих инструментов и своевременной их замене.
В промышленности СССР находятся в эксплуатации тысячи А. л. Например, только в металлообрабатывающей промышленности в 1967 действовало 4800 А. л.
Лит.: Машиностроение. Энциклопедический справочник, т. 9, М., 1949; Владзиевский А. П., Автоматические линии в машиностроении, М., 1958; Шаумян Г. А., Автоматы и автоматические линии, 3 изд., М., 1961; Богуславский Б. Л., Автоматы и комплексная автоматизация, М., 1964.
А. П. Владзиевский.
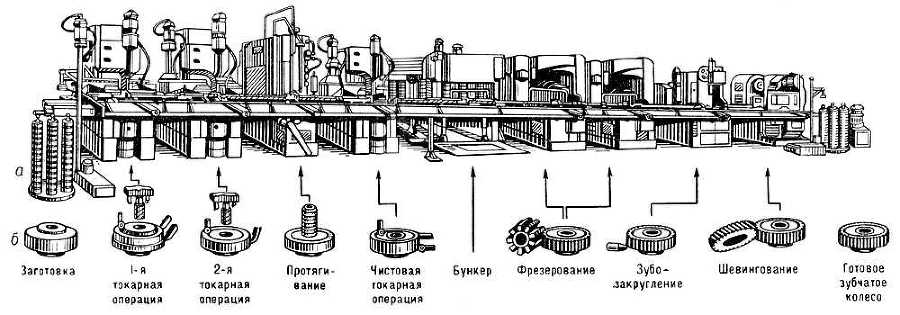
Рис. 2. Типовая автоматическая линия для обработки цилиндрических зубчатых колёс: а — общий вид; б — схема технологического процесса.
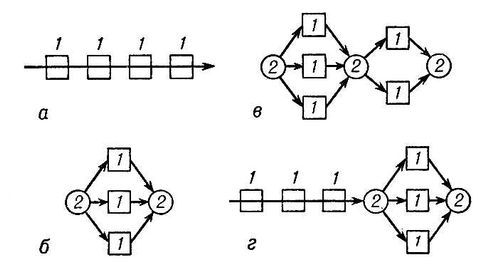
Рис. 1. Структурные компоновки автоматических линий: а — однопоточная последовательного действия; б — однопоточная параллельного действия; в — многопоточная; г — смешанная (с ветвящимся потоком); 1 — рабочие агрегаты: 2 — распределительные устройства.
Автоматическая лунная станция
Автомати'ческая лу'нная ста'нция (АЛС), космический аппарат, предназначенный для функционирования на поверхности Луны. Основная задача АЛС — проведение исследований физических условий на Луне и характеристик лунной поверхности, для чего на борту АЛС размещается научная аппаратура, а также радиотелеметрическая и телевизионная системы для передачи на Землю данных наблюдений и изображений лунной поверхности. Конструкция и аппаратура АЛС должны быть рассчитаны на работу в специфических условиях, существующих на Луне. Впервые в мире 3 февраля 1966 посадку на Луну совершила с помощью автоматической межпланетной станции советская АЛС «Луна-9», а затем «Луна-13» и АЛС США «Сервейер-1», «Сервейер-3», «Сервейер-5», «Сервейер-6», «Сервейер-7» (см. Космический летательный аппарат,Мягкая посадка). Описание отдельных АЛС см. в статьях «Луна», «Сервейер».
Автоматическая межпланетная станция
Автомати'ческая межплане'тная ста'нция (АМС), космический летательный аппарат, предназначенный для полёта к другим небесным телам и для изучения межпланетного космического пространства, Луны, планет. На борту АМС устанавливается соответствующая научная аппаратура. Результаты измерений передаются с борта АМС на Землю с помощью радиосистем, включая телевизионные системы для передачи изображений поверхности небесных тел. Обычно АМС снабжаются системами астроориентации и ракетным двигателем для коррекции траектории в полёте. Энергопитание бортовой аппаратуры АМС осуществляется от солнечных батарей. До 1 января 1969 запущено свыше 45 АМС: советские АМС серий «Луна», «Венера», «Марс» и «Зонд», американские АМС серий «Маринер», «Рейнджер», «Пионер» и др. Описание отдельных АМС см. в статьях «Луна», «Венера» и др., см. также ст. Космический летательный аппарат.
Автоматическая подстройка частоты
Автомати'ческая подстро'йка частоты', радиотехническое устройство для автоматического удержания заданной частоты электрических колебаний генератора. А. п. ч. применяют в передатчике для поддержания определенной частоты задающего генератора, в супергетеродинном радиоприёмнике для точной настройки на принимаемую станцию, в синтезаторе частот для умножения или деления частоты и др. В распространённой схеме А. п. ч. отклонение частоты от заданной (расстройка частоты) преобразуется дискриминаторомв постоянное напряжение соответствующего знака (полярности), пропорциональное амплитуде расстройки (при отсутствии расстройки напряжение на выходе дискриминатора равно нулю). Это выходное напряжение затем подаётся на управитель (реактивного сопротивления лампа, реактивного сопротивления транзистор, варикап и др.), воздействующий на частоту генератора.
Автоматическая регулировка усиления
Автомати'ческая регулиро'вка усиле'ния (АРУ), система, автоматически изменяющая усиление приёмника электрических колебаний при изменении напряжения сигнала на его входе. В радиовещательных приёмниках АРУ иногда называют устарелым термином автоматическая регулировка громкости (АРГ), в приёмниках проводной связи — автоматической регулировкой уровня. В радиолокационных и других импульсных приёмниках применяют АРУ, учитывающие особенности работы в импульсном режиме.
В большинстве случаев напряжение сигналов, поступающих на вход приёмника, значительно меняется: из-за различия мощностей передатчиков и расстояний их от места приёма, замираний сигналов при распространении, резкого изменения расстояний и условий приёма между передатчиком и приёмником, установленными на движущихся объектах (самолётах, автомобилях и т.д.), и других причин. Эти изменения приводят к недопустимым колебаниям или искажениям сигналов в приёмнике. Действие АРУ направлено на значительное уменьшение изменений напряжения выходных сигналов приёмника по сравнению с входными. Это осуществляется посредством цепей, которые передают выпрямленное детектором регулирующее напряжение на базы транзисторов или на управляющие сетки электронных ламп переменной крутизны, усилителей высокой, промежуточной частоты и преобразователя частоты, уменьшая их усиление с увеличением напряжения сигнала на входе и наоборот (рис. 1). Таким образом происходит компенсация в приёмнике изменений напряжения входных сигналов.
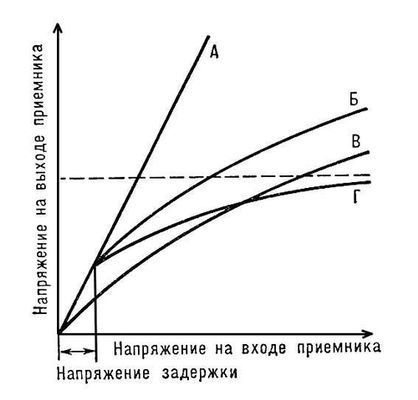
В устройствах радиосвязи распространены три типа АРУ: простая, задержанная и усиленно-задержанная. Наглядно действие АРУ можно отобразить на амплитудной характеристике приёмника (рис. 2). При отсутствии АРУ амплитудная характеристика выражается прямой линией (А — на рис. 2): напряжение сигнала на выходе прямо пропорционально входному. В результате действия простой АРУ (В — на рис. 2) происходит только частичная компенсация изменения напряжения входных сигналов. Недостаток простой АРУ — снижение усиления слабых сигналов — устраняется «задержкой» начала действия АРУ. Задержанная АРУ (Б — на рис. 2) действует так же, как и простая, когда напряжение сигнала на входе превысит некоторый уровень, определяемый напряжением задержки. Усиленно-задержанную АРУ с усилителем постоянного тока в цепи обратной связи применяют для получения большего постоянства напряжения сигнала на выходе приёмника (Г — на рис. 2). Наибольшее применение в приёмниках нашла задержанная АРУ.
Лит.: Сифоров В. И., Радиоприемные устройства, 5 изд., М., 1954; Тартаковский Г. П., Динамика систем автоматической регулировки усиления, М. — Л., 1957.