100: ret
101: halt
102: halt
103: halt
_catcher()
104:
106: ret
107: halt
_kill()
108:
# в следующей строке вызывается внутреннее прерывание операционной системы
10a: chmk $0x25
10c: bgequ 0x6 ‹0x114›
10e: jmp 0x14(pc)
114: clrl r0
116: ret
Рисунок 7.10. Результат дисассемблирования программы приема сигналов
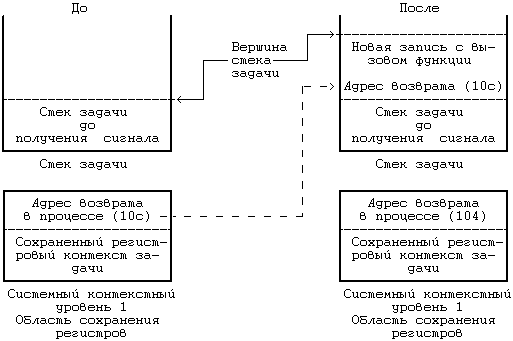
Рисунок 7.11. Стек задачи и область сохранения структур ядра до и после получения сигнала
Эту ситуацию можно разобрать на примере программы, представленной на Рисунке 7.12. Процесс обращается к системной функции signal для того, чтобы дать указание принимать сигналы о прерываниях и исполнять по их получении функцию sigcatcher. Затем он порождает новый процесс, запускает системную функцию nice, позволяющую сделать приоритет запуска процесса-родителя ниже приоритета его потомка (см. главу 8), и входит в бесконечный цикл. Порожденный процесс задерживает свое выполнение на 5 секунд, чтобы дать родительскому процессу время исполнить системную функцию nice и снизить свой приоритет. После этого порожденный процесс входит в цикл, в каждой итерации которого он посылает родительскому процессу сигнал о прерывании (посредством обращения к функции kill). Если в результате ошибки, например, из-за того, что родительский процесс больше не существует, kill завершается, то завершается и порожденный процесс. Вся идея состоит в том, что родительскому процессу следует запускать функцию обработки сигнала при каждом получении сигнала о прерывании. Функция обработки сигнала выводит сообщение и снова обращается к функции signal при очередном появлении сигнала о прерывании, родительский же процесс продолжает исполнять циклический набор команд.
Однако, возможна и следующая очередность наступления событий:
1. Порожденный процесс посылает родительскому процессу сигнал о прерывании.
2. Родительский процесс принимает сигнал и вызывает функцию обработки сигнала, но резервируется ядром, которое производит переключение контекста до того, как функция signal будет вызвана повторно.
3. Снова запускается порожденный процесс, который посылает родительскому процессу еще один сигнал о прерывании.
4. Родительский процесс получает второй сигнал о прерывании, но перед тем он не успел сделать никаких распоряжений относительно способа обработки сигнала. Когда выполнение родительского процесса будет возобновлено, он завершится.
#include ‹signal.h›
sigcatcher()
{
printf("PID %d принял сигнал\n", getpid()); /* печать PID */
signal(SIGINT, sigcatcher);
}
main()
{
int ppid;
signal(SIGINT, sigcatcher);
if (fork() == 0)
{
/* дать процессам время для выполнения установок */
sleep(5); /* библиотечная функция приостанова на 5 секунд */
ppid = getppid(); /* получить идентификатор родителя */
for (;;)
if (kill(ppid, SIGINT) == -1)
exit();
}
/* чем ниже приоритет, тем выше шансы возникновения конкуренции */
nice(10);
for (;;);
}
Рисунок 7.12. Программа, демонстрирующая возникновение соперничества между процессами в ходе обработки сигналов
В программе описывается именно такое поведение процессов, поскольку вызов родительским процессом функции nice приводит к тому, что ядро будет чаще запускать на выполнение порожденный процесс.
По словам Ричи (эти сведения были получены в частной беседе), сигналы были задуманы как события, которые могут быть как фатальными, так и проходящими незаметно, которые не всегда обрабатываются, поэтому в ранних версиях системы конкуренция процессов, связанная с посылкой сигналов, не фиксировалась. Тем не менее, она представляет серьезную проблему в тех программах, где осуществляется прием сигналов. Эта проблема была бы устранена, если бы поле описания сигнала не очищалось по его получении. Однако, такое решение породило бы новую проблему: если поступающий сигнал принимается, а поле очищено, вложенные обращения к функции обработки сигнала могут переполнить стек. С другой стороны, ядро могло бы сбросить значение функции обработки сигнала, тем самым делая распоряжение игнорировать сигналы данного типа до тех пор, пока пользователь вновь не укажет, что нужно делать по получении подобных сигналов. Такое решение предполагает потерю информации, так как процесс не в состоянии узнать, сколько сигналов им было получено. Однако, информации при этом теряется не больше, чем в том случае, когда процесс получает большое количество сигналов одного типа до того, как получает возможность их обработать. В системе BSD, наконец, процесс имеет возможность блокировать получение сигналов и снимать блокировку при новом обращении к системной функции; когда процесс снимает блокировку сигналов, ядро посылает процессу все сигналы, отложенные (повисшие) с момента установки блокировки. Когда процесс получает сигнал, ядро автоматически блокирует получение следующего сигнала до тех пор, пока функция обработки сигнала не закончит работу. В этих действиях ядра наблюдается аналогия с тем, как ядро реагирует на аппаратные прерывания: оно блокирует появление новых прерываний на время обработки предыдущих.
Второе несоответствие в обработке сигналов связано с приемом сигналов, поступающих во время исполнения системной функции, когда процесс приостановлен с допускающим прерывания приоритетом. Сигнал побуждает процесс выйти из приостанова (с помощью longjump), вернуться в режим задачи и вызвать функцию обработки сигнала. Когда функция обработки сигнала завершает работу, происходит то, что процесс выходит из системной функции с ошибкой, сообщающей о прерывании ее выполнения. Узнав об ошибке, пользователь запускает системную функцию повторно, однако более удобно было бы, если бы это действие автоматически выполнялось ядром, как в системе BSD.
Третье несоответствие проявляется в том случае, когда процесс игнорирует поступивший сигнал. Если сигнал поступает в то время, когда процесс находится в состоянии приостанова с допускающим прерывания приоритетом, процесс возобновляется, но не выполняет longjump. Другими словами, ядро узнает о том, что процесс проигнорировал поступивший сигнал только после возобновления его выполнения. Логичнее было бы оставить процесс в состоянии приостанова. Однако, в момент посылки сигнала к пространству процесса, в котором ядро хранит адрес функции обработки сигнала, может отсутствовать доступ. Эта проблема может быть решена путем запоминания адреса функции обработки сигнала в записи таблицы процессов, обращаясь к которой, ядро получало бы возможность решать вопрос о необходимости возобновления процесса по получении сигнала. С другой стороны, процесс может немедленно вернуться в состояние приостанова (по алгоритму sleep), если обнаружит, что в его возобновлении не было необходимости. Однако, пользовательские процессы не имеют возможности осознавать собственное возобновление, поскольку ядро располагает точку входа в алгоритм sleep внутри цикла с условием продолжения (см. главу 2), переводя процесс вновь в состояние приостанова, если ожидаемое процессом событие в действительности не имело места.