При периодических переключениях обмоток статора ШД магнитодвижущая сила (МДС) статора поворачивается на определенный шаг, вызывая поворот ротора на тот же шаг. Применение ШД даст возможность преобразовать управляющие импульсные сигналы в угол поворота вала без датчика обратной связи. В каждом сегменте присутствуют шаговые двигатели, которые заставляют суставы двигаться. Управление суставами и роботом в целом осуществляется с помощью компьютера, который заставляет вращаться конкретные шаговые двигатели. В некоторых манипуляторах вместо двигателей могут применяться пневматические или гидравлические элементы.
Сегодня основной областью применения электрических приводов в робототехнике являются мобильные ПР, легкие роботы с высококачественным управлением и промышленные роботы средней грузоподъемности. Создание новых типов электрических двигателей, специально предназначенных для ПР, позволяющих создавать более компактные комплектные приводы всех типов, способствует прогрессивному росту доли электрических приводов, используемых в робототехнике.
Бесщеточный двигатель постоянного тока (БДПТ). Бесщеточный или бес коллекторный —это один из типов приводов, набирающих популярность в робототехнике. Как понятно из названия, такой двигатель не использует щетки для коммутации, а вместо этого он коммутируется за счет электроники. Принцип работы данного привода основан на взаимодействии магнитных полей между электромагнитом и постоянным магнитом. Когда катушка находится под напряжением, противоположные полюса ротора и статора притягиваются друг к другу. Эти активаторы используются практически в любых роботах.
Достоинства БДПТ заключается в следующем:
–быстродействие относительно характеристик вращающего момента;
–более высокая частота вращения;
–высокие динамические характеристики;
–длительный срок службы;
–бесшумная работа.
Недостатки:
–сложный и дорогостоящий регулятор скорости;
–не работает без электроники;
–синхронный привод.
В промышленных роботах применяются электроприводы с двигателями постоянного либо переменного тока. В роботах с позиционным управлением и цикловым управлением по упорам применяются электроприводы дискретного действия. Причем управление скоростью для обеспечения позиционирования в заданной точке также осуществляется дискретно. Изменение скорости обычно осуществляется при использовании двигателей постоянного тока путем включения гасящих сопротивлений в цепь якоря, а при использовании двигателей переменного тока – переключением пар полюсов или переходом на другой двигатель, а также торможением с помощью демпфирующих устройств.
В системах контурного управления необходимо осуществление непрерывного управления перемещением и скоростью перемещения рабочих органов ПР. Здесь наряду с электродвигателями непрерывного действия используются шаговые электродвигатели, обеспечивающие высокую точность позиционирования при отсутствии дополнительных элементов обратной связи по положению и скорости.
Следует отметить ряд специфических особенностей использования электроприводов в промышленных роботах. К ним, прежде всего, необходимо отнести работу в существенно нестационарных нагрузочных режимах, обусловленных изменяющейся конфигурацией манипуляционной системы ПР. Это обстоятельство предъявляет повышенные требования к жесткости электропривода, что и обусловливает наличие отдельного контура стабилизации скорости с тахогенераторами в качестве датчиков обратной связи. Кроме того, не стационарность нагрузки приводит к существенным колебаниям приведенного к валу электродвигателя момента инерции нагрузки, что предъявляет дополнительные требования к динамическим характеристикам привода.
Синхронный двигатель содержит ротор, который синхронно вращается с колеблющимся полем или током. Синхронные приводы имеют множество преимуществ перед другими двигателями. В первую очередь это относится к энергетическим показателям. Их применяют как в позиционном, так и в контурном режимах работы.
Преимущества:
–высокая экономичность;
–удобство сборки и хорошие регулировочные свойства;
–очевидна целесообразность применения синхронного привода для механизмов, не требующих регулирования скорости.
Недостатки:
–применение синхронного двигателя затруднено, если механизмы обладают большими маховыми массами, где необходимо иметь регулируемый или двойной привод;
–не имеет начального пускового момента, следовательно, для его пуска необходимо разогнать ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
Асинхронные двигатели (АД) – имеют ограниченное применение в ПР. Это объясняется сложностью и высокой стоимостью электронных преобразователей, применяемых для регулирования частоты вращения. Тем не менее в ПР грузоподъемностью свыше 40 кг их использование оправдано.
В зависимости от вида напряжения питания и отметки статора различают двух и трехфазные АД. Этот тип двигателя используется в основном для питания ведущих колес автомобиля, поэтому и может найти место в колесной робототехнике. Наличие мощных полупроводников сделало практичным использование более простых асинхронных электродвигателей переменного тока.
Преимущества:
–простота и надежность из-за отсутствия коллектора;
–низкая стоимость;
–значительно низкая масса;
–меньшие габариты.
Недостатки:
–могут перегреваться, особенно под нагрузкой;
–невозможность стабильно держать частоту вращения;
–относительно небольшой пусковой механизм.
Сервопривод. Это тип электромеханических двигателей, которые не вращаются постоянно, как шаговые, а перемещаются по сигналу в определенное положение и сохраняют его до следующего сигнала. В сервоприводах используется механизм обратной связи, позволяющий обрабатывать ошибки и исправлять их в позиционировании. Такая система называется следящей. Если какая-то сила оказывает давление на привод, изменяя его положение, двигатель будет применять силу в противоположном направлении, чтобы исправить возникающую ошибку. Таким образом, достигается высокая точность позиционирования.
Звенья, сочленённые посредством редукторов, приводятся в движение, и удерживаются в определенном положении при помощи сервомоторов (серводвигателей), рис 3.7.
Рис. 3.7. Сервомотор
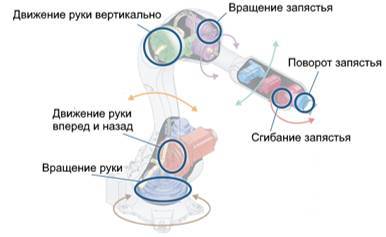
Сервомоторы являются высокопроизводительными моторами, способными точно контролировать положение и скорость, но не каждый тип сервомотора подойдет для современного промышленного робота, так как есть ряд строгих требований, например, точность перемещения до 0,01мм. Расположение серводвигателей в роботах отмечено красными кружками на рис. 3.8.
Преимущества сервомоторов:
–более высокая скорость вращения;
–высокая мощность;
–позиция механизма всегда на виду и доступна для корректирования.
Недостатки:
–сложная система подключения и управления;
–требует квалифицированного обслуживания;
–высокая стоимость.
Рис. 3.8. Расположение и назначение сервомоторов
Редукторы. Физически функцию сустава (сочленения), соединяющего два соседних звена робота, несут редукторы. Они представляют собой, как правило, законченное механическое устройство, с корпусом в виде составного цилиндра. С одной стороны редуктор крепится к звену N, где установлен мотор, с другой стороны к редуктору крепится корпус звена N+1. Расположение и назначение редукторов показано на рис.3.9.