Юрий Почанин
Робототехника в промышленности
Введение
Широкое распространение в производственной деятельности человека получили сегодня промышленные роботы. Они служат одним из эффективнейших средств механизации и автоматизации транспортных и погрузочных работ, а также многих технологических процессов.
С появлением станков с числовым программным управлением (ЧПУ) возникла необходимость в создании программируемых манипуляторов для разных операций по загрузке и разгрузке станков. Так в 1954 году американский инженер Д. Девол запатентовал способ управления погрузочно-разгрузочным манипулятором с помощью сменных перфокарт. Вместе с Д. Энгельбергом в 1956 г. он организовал первую в мире компанию по выпуску промышленных роботов. (универсальная автоматика). Позже в 1962 году в Соединенных Штатах были созданы первые промышленные роботы названные «Юнимейт» и «Версатран». Их сходство с человеком ограничивалось наличием манипулятора, отдаленно напоминающего человеческую руку. Что интересно, некоторые из них работают до сих пор, превысив 100 тысяч часов рабочего ресурса. «Юнимейт» мог перемещать объекты массой до 12 кг с точностью 1,25 мм.
Робототехника- это новое комплексное научно-техническое направление, включающее разработку, создание и использование манипуляторов, роботов и роботизированных технологических комплексов, а также связанные с этим организационные, социально-экономические и психологические аспекты, требующие нового научного подхода.
Промышленный робот стал еще одним шагом в развитии гибкой автоматизации для оптимизации производства с возможностью не только постоянно повторять одни и те же операции с гарантированной точностью, но и с возможностью простого перепрограммирования в случае изменения производственной программы пользователя.
Уровень и способы автоматизации производства существенно зависят от его вида и масштабов, и если в массовом и крупносерийном производстве наиболее оправданным является использование автоматических линий, то в среднесерийном и мелкосерийном и единичном производстве комплексная автоматизация стала возможной с появлением ЭВМ, станков с ЧПУ и промышленных роботов. На базе технологического оборудования с числовым программным управлением и промышленных роботов компонуются многономенклатурные линии, участки, цеха, получившие название гибкого автоматизированного производства.
Следует отметить, что основным направлением гибкой автоматизации является роботизация. Основным принципом построения таких гибких производств является модульность. Автоматизация гибкого производства развивается от простого к сложному – первоначально создаются и внедряются гибкие производственные модули (ГПМ), на их основе строятся гибкие производственные комплексы (ГПК) и, наконец, гибкие автоматизированные производства (ГАП).
Дальнейшим их развитием является создание практически безлюдного автоматического производства, где гибкие автоматизированные производства дополняется системами автоматизированного проектирования выпускаемых изделий (САПР) и технологической подготовки их производства, планирования и диспетчерского управления (АСУП).
Промышленные роботы могут выполнять задачи, которую раньше могли выполнять только люди. Кроме того, изменился характер производства – около 80% изделий изготовляется малыми сериями. Автоматизация производства поэтому становится одним из существенных рычагов повышения производительности труда в мелкосерийном производстве (экономический фактор).
Исследования показывают, что при использовании на отдельных операциях один промышленный робот в зависимости от сменности работы заменяет 1-3 рабочих, повышает производительность труда на 60-80% и снижение затрат на подготовку производства на 45-50%. При групповом использовании эффективность промышленных роботов резко возрастает: производительность увеличивается не менее чем в 3-5 раз, а в отдельных случаях в 8-10 раз, относительно уменьшаются капитальные вложения и расходы на обслуживание, повышаются интенсивность и ритмичность производства, сменность, качество продукции, сокращается количество брака.
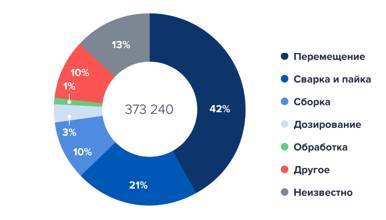
По данным аналитического отдела ГПБ Инвестиции на 2020 год в мире установлено 373240 промышленных роботов, сферы их применения представлены на диаграмме, рис. В.1.
Рис.В1. Сферы применения промышленных роботов в мире
По этим данным видно, что основное применение роботов в мире является перемещением, а также для сварки и пайки. С усовершенствованием и появлением новых технологий функционал у производственных аппаратов увеличится.
Глава 1. Классификация промышленных роботов
В соответствии с международным стандартом ISO 8373:2012 «Robots and robotic devices— Vocabulary» роботом является приводной механизм, который можно запрограммировать по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий задачи по предназначению», где «автономность – способность выполнять задачи по предназначению, основанная на текущем состоянии изделия и особенностях считывания данных без вмешательства человека».
В более широком понимании современный робот – механизм, выполняющий запрограммированные действия, который воспринимает окружающий мир с помощью сенсоров (датчиков, микрофонов, камер), строит модели поведения, чтобы выполнять определенную программу, и способен воздействовать на физический мир тем или иным способом.
Роботом можно назвать любое устройство или механизм, который выполняет предназначенные ему действия и одновременно отвечает трём условиям:
–воспринимает окружающий мир с помощью сенсоров, такими сенсорами могут быть микрофоны, камеры (всех областей электромагнитного спектра), различные электромеханические сенсоры, датчики и прочее;
–понимает окружающий мир и строит модель поведения, чтобы выполнять предназначенные ему задачи;
–воздействует на физический мир.
Если хотя бы одно из условий не выполняется, то такое устройство нельзя назвать роботом.
В соответствии с ГОСТом Р 60.0.0.2-2016 “Роботы и робототехнические устройства” промышленные роботы подразделяются на две большие группы:
–промышленные манипуляционные роботы, выполняющие основные технологические операции;
–промышленные транспортные роботы, осуществляющие межцеховые и внутрицеховые перемещения грузов, на транспортном роботе могут быть установлены манипуляционный робот или другое устройство для выполнения погрузочно-разгрузочных работ.
В свою очередь промышленные манипуляционные роботы классифицируются по следующим признакам:
–специализация;
–грузоподъемность;
–способ управления;
–способ программирования;
–тип привода;
–возможность передвижения;
–выполняемая технологическая операция;
–кинематическая схема;
–способ установки на рабочем месте.
По специализации промышленные манипуляционные роботы подразделяются на:
–специальные;
–специализированные;
–универсальные.
По грузоподъемности подразделяют на:
–сверхлегкие – роботы грузоподъемностью меньше 1 кг;
–легкие – роботы грузоподъмностью от 1 до 10 кг;
–средние – роботы грузоподъемностью от 10 до 200 кг;
–тяжелые – роботы грузоподъемностью от 200 до 1000 кг;
–сверхтяжелые – роботы грузоподъемностью свыше 1000 кг.
По количеству манипуляторов подразделяются на:
–одноманипуляторные (однорукие);