Рис. 3.9. Расположение и назначение редукторов
Редукторы нижних осей (с первой по третью) обычно имеют полую середину для того, чтобы сквозь них можно было провести электрические провода и пневматические трубки для следующих осей и исполнительного органа (инструмента) робота. Однако, основной задачей редуктора является увеличение силы вращения мотора, за счет снижения скорости вращения. Внутри редуктора находится множество механических передач разного рода, устроенных таким образом, чтобы вращение вала двигателя преобразовывалось в более мощное вращение на выходе из редуктора, но с меньшей скоростью. Таким образом, уменьшая вращение мотора в 10 раз, можно достичь десятикратного увеличения мощности привода.
Трансмиссия или передача – является компонентом, который передает крутящий момент, вырабатываемый приводами и редукторами и преобразует его в движение робота. Виды передач, используемых в промышленных роботах, показаны на рис.3.10.
Трансмиссия также способна изменять направление и величину мощности привода. Двигатель, используемый в роботах, обычно размещается рядом с суставами, но его также можно разместить вдали от суставов, используя трансмиссионные механизмы, такие как ремни и шестерни. Такая схема применяется в запястье роботов серии R от Kawasaki, что позволило сделать запястье более компактным.
Рис. 3.10. Виды передач
.
Довольно часто манипуляторы имеют встроенные датчики давления, благодаря чему они могут контролировать силу захвата. К примеру, в задачу робота может входить перемещение лампочки с одного места на другое, чтобы проверить работает ли она. Если сила будет высока, то лампочка просто лопнет. Контролирование силы сжатия гарантирует, что лампочка не пострадает. При помощи других конечных эффекторов могут использоваться распылители порошка, различные дрели и так далее.
Устройство управления приводом. Устройство управления приводом может быть непрерывного действия, релейным, импульсным или цифровым.
Обобщенная функциональная схема привода промышленных роботов приведена на рис. 3.11.
Рис. 3.11. Обобщенная функциональная схема привода:
КС – канал связи; ОС – обратная связь
Функциональна схема электропривода. Электропривод современного ПР представляет собой комплекс приводов, каждый из которых управляет отдельной степенью подвижности. Рассмотрим на примере электроприводного ПР модели HdS05/06 (фирма GdA, Германия) наиболее распространенную функциональную схему, рис. 3.12.
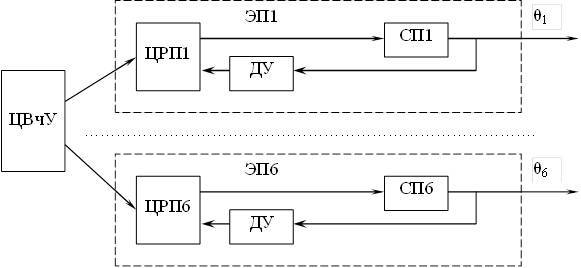
Рис.3.12. Функциональная схема управления электромеханического робота модели HdS05/06.
Данный ПР обладает шестью степенями подвижности, обозначенными на схеме как θ1…θ6. Все шесть электроприводов (ЭП1…ЭП6) управляются от общего центрального вычислительного устройства (ЦВчУ) системы программного управления (СПУ) ПР. Центральное вычислительное устройство выдает сигналы на цифровые регуляторы положения (ЦРП1-ЦРП6) отдельных приводов. Цифровые регуляторы положения управляют сервоприводами (СП1-СП6) в соответствии с сигналами ЦВчУ и датчиков угла (ДУ), например, кодовых датчиков угла с фотоэлектрическим преобразованием.
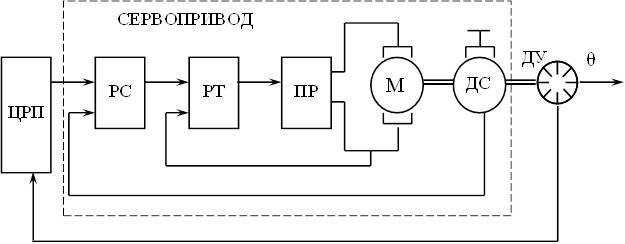
Одним из наиболее сложных и ответственных элементов в электроприводном ПР является сервопривод (СП). Схема сервопривода ПР приведена на рис. 3.13.
Рис. 3.13. Схема сервопривода ПР.
Данная схема представляет собой аналогово-цифровую систему автоматического управления, в которой сочетаются преимущества комбинированной аналоговой системы, работающей по принципу трехконтурной системы подчиненного регулирования, с достоинствами цифровой системы (высокая точность и удобство программирования).
Первый контур образован двигателем (М) с преобразователем (ПР) и регулятором тока (РТ). Во второй контур входят датчик скорости (ДС) и регулятор скорости (РС). В состав третьего контура дополнительно входят датчик угла (ДУ) и цифровой регулятор положения (ЦРП).
В качестве регуляторов скорости и тока в ПР чаще всего используются аналоговые, а в последнее время – и цифровые, операционные усилители с помощью которых легко реализуется практически любой требуемый закон управления. Датчик скорости также может быть как аналоговым, так и цифровым.
В ряде случаев применение датчика скорости не требуется, т.к. сигнал об изменении скорости может быть вычислен в цифровом регуляторе положения (ЦРП) путем дифференцирования сигнала с датчика угла (ДУ)
Современные тенденции развития робототехники таковы, что позволяют выпускать сервоприводы, которые конструктивно объединяют двигатель, преобразователь, датчики и регуляторы скорости и тока.
Для электроприводов используют специальные двигатели с электромагнитным тормозом и управлением от ЧПУ, обеспечивающие многопозиционное или контурное управление. В малых и средних роботах применяются высоко моментные шаговые приводы. Электроприводы комплектуют шаговыми и линейными двигателями.
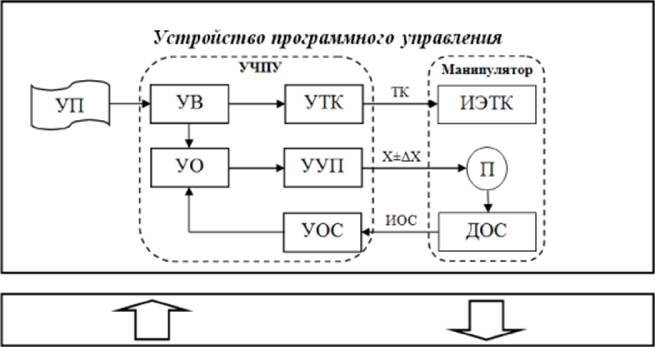
Структура устройства программного управления приводом показана на рис.3.14.
Рис. 3.14. Структура устройства программного управления:
УП—управляющая программа; УВ—устройство ввода; УО—устройство обработки; УУП—устройство управления приводом; УТК—устройство технических команд; УОС—устройство обратной связи; ИЭТК—исполнительные элементы технологических команд; П—привод; ДОС—датчик обратной связи; ТК—технологическая команда; ИОС—информация обратной связи.
В общем случае, структура привода образована устройством управления, состоящим из информационной и силовой частей, двигателя, передаточного устройства, выполняющего передачу механического движения от двигателя к исполнительному органу и согласование видов их движений и их параметров.
Структура электропривода роботов, в общем случае, образована электродвигателем с датчиками обратной связи по положению и скорости, передаточным устройством (механической передачей), тормозом, муфтами (например, для защиты двигателя от перегрузки) и устройством управления.
По функциональному признаку приводы ПР делятся на регулируемые и следящие. Регулируемые приводы работают, в основном, с ЦПУ (цикловым программным управлением). Следящие приводы – с ЧПУ и применяются тогда, когда необходима фиксация движения в любой точке.
3.1.2. Рабочий орган промышленного робота
Рабочий орган или захватное устройство – это узел механической системы ПР, обеспечивающий захватывание и удержание в определенном положении объекта манипулирования. Объекты могут иметь различные размеры, форму и массу, поэтому захваты относят к числу сменных элементов ПР и манипуляторов. Как правило, ПР комплектуют набором типовых (для данной модели) захватных устройств, которые можно менять в зависимости от требований конкретной технологической задачи.
Манипуляторы промышленных роботов оснащают двумя классами рабочих органов, к которым относятся:
–захватные устройства (ЗУ), предназначенные для захватывания и удержания предметов производства (ПП) или технологической оснастки;