Данный пневмоцилиндр позволяют обеспечить только две точки позиционирования, соответствующие втянутому и выдвинутому положению штока. Соответственные позиции занимают и связанные со штоком объекты. Для увеличения точек позиционирования применяют многопозиционные пневмоцилиндры.
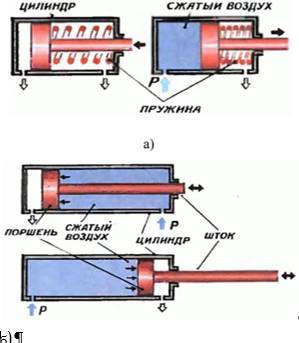
Рис. 3.5. Принцип действия пневмоцилиндра:
а-одностороннего действия, б-двустороннего действия
Все достоинства и недостатки пневмопривода связаны со свойствами главного рабочего тела – сжатого воздуха. Его высокая экологичность обусловливает широкое применение именно пневмоприводов в пищевой, электронной, фармацевтической промышленности и в точном приборостроении.
К недостаткам следует отнести:
–трудность реализации следящего привода;
–невозможность точного позиционирования из-за высокой сжимаемости энергоносителя;
–значительные размеры исполнительных двигателей из-за ограниченного давления энергоносителя (не более 0,6 МПа);
–необходимость в специальных тормозных устройствах для остановки исполнительных органов в заданных точках с доступными ускорениями;
–пониженный КПД (0,15-0,20).
Гидравлические приводы являются более сложными и дорогими по сравнению с пневматическими и электрическими. Однако простота реализации бесступенчатого регулирования скоростей, малая инерционность и компактность, возможность организации следящих систем с высоким быстродействием, а также наилучшее соотношение массогабаритных характеристик и удельной стоимости в диапазоне от 500 до 1 000 Вт и выше определяют их использование в качестве основного типа привода для тяжелых и сверхтяжелых роботов, рис.3.6.
Рис. 3.6. Гидравлический привод
Хорошая управляемость гидравлических приводов при наличии высококачественных динамических характеристик способствует их применению и в роботах средней грузоподъемности.
Объемным гидравлическим приводом называется совокупность устройств и гидролиний, предназначенных для передачи энергии и приведения в движение механизмов и рабочих органов машин посредством жидкости под давлением.
В гидроцилиндрах одностороннего действия шток выдвигается из исходного положения за счёт создания давления рабочей жидкости в цилиндре, а возврат – за счёт пружины. В гидроцилиндрах двухстороннего действия усилие на штоке создается за счет давления рабочей жидкости и при прямом, и при обратном ходе штока.
В качестве рабочих жидкостей применяются минеральные, синтетические и полусинтетические масла, жидкости на силиконовой основе, водомасляные и масляно-водные эмульсии. Гидропривод обеспечивает большой диапазон рабочих нагрузок робота (1…10000) Н, высокую точность позиционирования (0,01…2) мм, широкий диапазон скоростей рабочих органов (15… 2000) мм/с или (3…180) град/с. Рабочее давление жидкости лежит в пределах (14…21) Мпа.
Элементы гидропривода, аналогичны элементам пневмопривода: двигатель поступательного движения (гидроцилиндр) или углового перемещения (поворотный гидродвигатель). Различие состоит в использовании вместо сжатого воздуха гидрожидкости, (как правило, масла) подаваемого под давлением до 20 МПа. Это обеспечивает создание усилий на два порядка большее. Лучшие динамические показатели и показатели точности гидропривода обусловлены не сжимаемостью жидкости.
Для управления гидравлическими двигателями тоже используются золотники и клапаны. Поскольку они, как правило, имеют электрическое управление, то их называют электрогидравлические усилители (ЭГУ). Управление гидроприводами, обычно непрерывное.
Отличие от пневмоприводов состоит в том, что гидроприводы имеют собственный блок питания, входящий в состав робота. Образован он гидронасосом, фильтром, регулятором давления, устройством охлаждения и емкостью для гидрожидкости.
Достоинствами гидравлического привода являются:
–компактность и быстродействие,
–малая масса исполнительных двигателей,
–жесткие статические и высокие динамические характеристики,
–простота настройки точных значений скоростей звеньев и надежности их фиксации в текущих положениях,
–неограниченные мощность и грузоподъемность.
Благодаря высоким точностным качествам, гидропривод обеспечивает сложные технологические движения, необходимые, например, при контурной сварке и сборке.
К недостаткам гидропривода относятся:
–необходимость в собственных энергоустановках для преобразования энергии (гидростанциях);
–сравнительно малая скорость передачи гидравлического импульса при большой длине трубопроводов (более 2 м), снижающая быстродействие;
–зависимость расхода рабочей жидкости от влияния внешних условий окружающей среды (в первую очередь, температуры), что приводит к колебаниям скорости звеньев манипуляционного механизма;
–конструктивная сложность и высокие требования к исполнению элементов гидросистемы.
Электрический привод, несмотря на его хорошую управляемость, простоту подвода энергии, больший к.п.д. и удобство эксплуатации имеет худшие массогабаритные характеристики, чем пневматический и гидравлический приводы. Электрические приводы не обладают столь же большой силой или быстродействием, но позволяют добиться лучших точностных характеристик и поэтому наибольшее распространение получил привод на основе электродвигателей. Электродвигатели могут осуществлять вращательное или линейное движение, движение без цели или точное позиционирование (шаговые двигатели), Электрические приводы используются в 40…50% серийно выпускаемых ПР со средней грузоподъемностью и числом степеней подвижности 3…6. Точность позиционирования электрического привода достигает значений до ± 0,05 мм. Их применяют как в позиционном, так и в контурном режимах работы.
Электропривод ПР состоит из следующих элементов:
– исполнительного элемента (двигателя);
– преобразователя;
– регуляторов тока, скорости и угла;
– датчиков обратной связи по току, скорости и углу.
Особенностями электроприводов ПР являются расширенный диапазон малых моментов (всего до 0,05 Нм), повышенная максимальная частота вращения (до 15×103 об/мин), уменьшенная инерция двигателей, возможность встраивания в ЭД электромагнитных тормозов и различных датчиков, а также механических и волновых передач.
В последнее время в мировой и отечественной практике применения ПР электрический привод находит все большее применение. Применяются следующие электродвигатели. В настоящее время следящие электроприводы ПР, как правило, строятся на базе электродвигателей постоянного тока (ПТ), так как при этом получается более простые надежные схемы управления. По способу возбуждения электродвигатели ПТ делятся на электродвигатели с электромагнитным возбуждением и с возбуждением от постоянных магнитов.
Двигатели с возбуждением от постоянных магнитов наиболее перспективны вследствие малой инерционности. К преимуществам этих двигателей следует отнести также высокий КПД и независимость потока возбуждения от изменения температуры окружающей среды.
Двигатели постоянного тока с вентильным (тиристорным) управлением позволило создать бесконтактные двигатели ПТ, в которых щеточно-коллекторный узел заменен надежной полупроводниковой схемой.
Системы электродвигателей ПР являются реверсивными. Реверсивный преобразователь должен обеспечить протекание тока в обоих направлениях.
Шаговые двигатели (ШД). Все большее распространение в ПР получает дискретный привод с шаговыми двигателями, который через механическую передачу соединен с исполнительным механизмом. Принцип действия ШД основан на дискретном изменении магнитного поля в зазоре машины.