Разберемся, какие силы действовали в этот критический момент на машину и как удалось изменить их «расстановку», чтобы избежать беды. Понятно, что задние колеса потеряли сцепление с дорожным покрытием из-за резкого перемещения веса вперед, вызванного сбросом газа. Поворот руля привел к перемещению веса на «внешние» колеса.
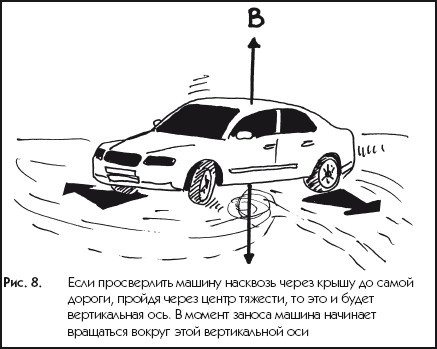
Рис. 8. Если просверлить машину насквозь через крышу до самой дороги, пройдя через центр тяжести, то это и будет вертикальная ось. В момент заноса машина начинает вращаться вокруг этой вертикальной оси
Это означает, что давление на определенные колеса изменилось, следовательно, изменилось и их сцепление с дорогой. В нашем случае перемещение веса шло одновременно в двух направлениях: продольном и поперечном. В такой ситуации автомобиль почти всегда норовит выйти из-под контроля. Водитель хотел изменить направление движения автомобиля, то есть во что бы то ни стало повернуть машину, в то время, когда она опиралась практически всем своим весом на одно-единственное «внешнее» переднее колесо. Как мы уже знаем, для замедления или изменения направления движения массы автомобиля к ней требуется приложить силу. Но площади контакта с дорогой одного-единственного колеса для того, чтобы эта сила подействовала, явно недостаточно. Что же произошло, когда водитель прибавил газ? Вес перераспределился назад, и задние колеса обрели сцепление с дорогой («внешнее» больше, «внутреннее» меньше), что и остановило начинающийся занос задней оси. Прибавляя газ, водитель чисто интуитивно несколько повернул руль обратно – «распустил» машину, то есть добавил нагрузку на оба «внутренних» колеса.
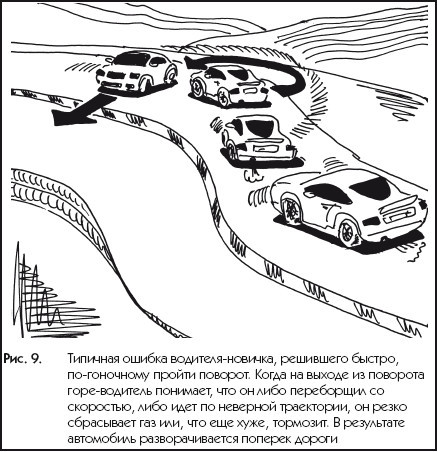
Рис. 9. Типичная ошибка водителя-новичка, решившего быстро, по-гоночному пройти поворот. Когда на выходе из поворота горе-водитель понимает, что он либо переборщил со скоростью, либо идет по неверной траектории, он резко сбрасывает газ или, что еще хуже, тормозит. В результате автомобиль разворачивается поперек дороги
И поступил абсолютно правильно. Если бы на его месте был автогонщик, он поступил бы точно так же. Вся разница лишь в том, что автогонщик точно знает, как его автомобиль будет реагировать на перемещение веса, а обычный водитель ни о каком перемещении веса и не догадывается. А любое изменение направления или характера движения, как мы уже знаем, будь то ускорение или замедление, поворот налево или направо, обязательно сопровождается перемещением веса, из-за чего меняется или перераспределяется сцепление с дорогой каждой из четырех шин. Кто не попадал в подобные передряги, описывая потом происшедшее примерно так: «А потом мою машину внезапно кинуло в сторону, и я вылетел с дороги: просто не повезло»? По этой причине мы и разобрали так подробно эту аварийную ситуацию.
Конечно, обычный водитель не сможет так филигранно «заправлять» свой автомобиль в повороты с головокружительной скоростью, как автогонщик, умело использующий перемещение веса в свою пользу. Но знать элементарные законы физики движения автомобиля он обязан. Иначе ему не овладеть высшим искусством управления автомобилем.
Если вам предстоит ездить по абсолютно гладкой поверхности, например такой, как сукно биллиардного стола или поверхность ледяного катка, то о вертикальном перемещении веса вашего автомобиля говорить не придется. На самом деле мы встречаем на дорогах массу неровностей. Это волнистый асфальт, бугры, крутые подъемы и спуски, ямы и другие неровности. Всего перечисленного с лихвой хватает на наших шоссейных дорогах и автострадах.
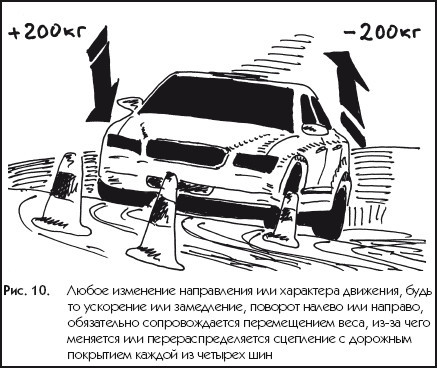
Рис. 10. Любое изменение направления или характера движения, будь то ускорение или замедление, поворот налево или направо, обязательно сопровождается перемещением веса, из-за чего меняется или перераспределяется сцепление с дорожным покрытием каждой из четырех шин
Представим себе такую ситуацию: ваша машина въехала с большой скоростью на бугор. Кузов устремляется вверх, подвеска разгружается, и в этот момент вы решаете изменить направление движения. Это ошибка. Именно в это мгновение контакт шин вашего автомобиля с дорогой очень слабый. А вот буквально через секунду, когда кузов автомобиля опустится, шины вновь обретут сцепление, причем еще большее, чем до подскока. Объяснять, почему это так, нет необходимости, и так все понятно. В этот момент машина чутко откликнется на поворот руля. Раллисты очень хорошо изучили, как ведет себя автомобиль на буграх. Они проносятся по ним с такой скоростью, что автомобиль взлетает высоко в воздух; поэтому такие неровности называются у них не иначе, как трамплины.
На поведение автомобиля в повороте, говоря простым языком, на его устойчивость, оказывает влияние также и конструкция автомобиля: передний, задний или полный привод, расположение двигателя (переднее, заднее, среднее). Важную роль играет и развесовка машины, то есть в какой пропорции вес распределяется между передней и задней осью. Само собой разумеется, что автомобили с современными многорычажными подвесками охотнее слушаются водителя на виражах, чем те, у которых подвески устаревшего образца. Но это чисто технические причины. Огромную роль играет и величина сил, действующих на машину при прохождении поворотов. Водители, не вникая в подробности, говорят в данном случае о том, как держат шины – хорошо или плохо. Влияет на устойчивость и дополнительный вес: едет ли водитель один или с пассажирами, везет ли тяжелый багаж, много ли топлива в баке. Ускорение на повороте, конструкция подвесок машины, давление в шинах, торможение – все это может самым непосредственным образом повлиять на то, какие колеса, передние или задние, начнут терять сцепление с дорогой первыми. Это очень важно. Помните, что мы говорили про снос и занос?
Рис. 11. «Настоящие проблемы начинаются, когда все четыре колеса оказываются в воздухе. Пока хотя бы одно колесо касается дороги, водитель не только должен, но и обязан управлять машиной» (Владислав Барковский, автогонщик и каскадер)
Если скользят передние колеса, то это снос, или недостаточная поворачиваемость. Если задние, то мы имеем дело с заносом, и это называется избыточной поворачиваемостью. Если скользят все четыре колеса одновременно – это нейтральная поворачиваемость. Понятно, что последний вариант предпочтительнее, так как при этом автомобиль не вращается вокруг вертикальной оси. Итак, если автомобиль поворачивается на вираже, водитель не крутит руль, а ведет машину по дуге с прибавлением газа, то такое поведение машины и будет называться поворачиваемостью. Рассмотрим более подробно, что это такое.
Сначала – небольшой экскурс в теорию движения автомобиля, вернее, в тот подраздел, где рассматривается увод колес при прохождении поворота. Представим себе, что водитель повернул колеса на повороте дороги на определенный угол. На маленькой скорости машина пошла по заданному радиусу.
Рис. 12. Если скользят задние колеса, то мы имеем дело с заносом, и это называется избыточной поворачиваемостью
Если описать условную окружность, то она будет иметь определенный диаметр независимо от того, сколько кругов по ней накатать (угол поворота колес остается неизменным). Увеличив скорость, мы увидим, что начал увеличиваться диаметр нашей окружности. Это увеличение вызывает увод колес, при котором направление пятна контакта шин с покрытием дороги смещается относительно диска колеса. Проще говоря, направление движения шины стало отличаться от направления движения диска колеса. Можно сказать и так: теоретическое направление качения шины стало отличаться от реального, заданного определенным поворотом руля. Именно эта разница, то есть угол между теоретическим и реальным направлением качения шины, и показывает величину увода колес, который привел к увеличению радиуса нашей окружности. Поедем еще быстрее. В какой-то момент сцепление шин с дорогой достигнет критического значения, и они начнут скользить. Одновременно все четыре? Это было бы не самым худшим вариантом, так как в этом случае просто еще больше увеличивается диаметр окружности, но автомобиль не вращается вокруг вертикальной оси. Такое поведение автомобиля в момент потери сцепления с дорогой и скольжения всех четырех шин и называют нейтральной поворачиваемостью. Ее характеризует то, что все четыре колеса имеют одинаковый угол увода. (Именно так стараются настроить свои болиды автогонщики, что позволяет им полностью контролировать поведение машин при прохождении поворотов на больших скоростях.)