Второй предполагает полет носителя без визуального контакта. Пилотирование осуществляется управляющим модулем, расположенным вне носителя. Для восполнения недостающей информации о положении аппарата используются внешние или бортовые системы, определяющие необходимые для управления данные. Вторая группа систем управления предусматривает полет носителя на любое удаление вплоть до максимального радиуса действия БПЛА. Пилотирование носителем осуществляется бортовым вычислительным комплексом. Постановка целевой задачи выполняется в форме замкнутого или незамкнутого полетного задания. Полетное задание закладывается в память БПЛА перед взлетом. В систему управления аппаратом входят датчики состояния и положения, вычислительный комплекс и исполнительные устройства. Возможно также и наличие системы связи для обмена данными с оператором.
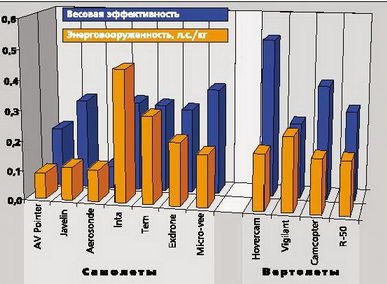
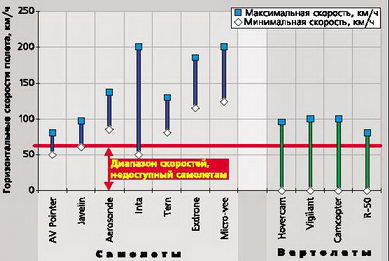
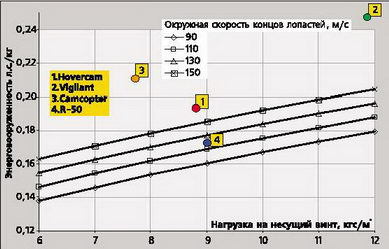
Анализируя типы бортовых комплексов, можно сделать вывод, что БПЛА предназначены либо для полетов с малыми скоростями вблизи оператора, либо для полета вне визуального контакта с относительно большими скоростями и радиусами действия. Таким образом, проектирование малоразмерных беспилотных вертолетов должно производиться с оптимизацией летных характеристик как минимум для двух диапазонов скоростей (до и после 50-60 км/ч). Проектирование вертолета, предназначенного для полета с высокими горизонтальными скоростями, надо производить вместе с оценкой эффективности применения в таких случаях и самолетов, так как их показатели в рассматриваемом случае могут оказаться более приемлемыми. К числу определяющих факторов, кроме скорости полета, следует отнести и ограничения по габаритам, накладываемые требованиями эксплуатации. Рис 2. Показатели энерговооруженности и весовой эффективности рассматриваемыъ самолетов и вертолетов Рис 3. Возможные скорости горизонтального полета рассматриваемых БПЛА Рис 4. Зависимость энерговооруженности от нагрузки на площадь 1c и окружной скорости концов лопастей Наибольшее прикладное значение имеет проектирование вертолета для полета на малых скоростях. Проектировочными параметрами, влияющими на эффективноетъ несущем системы и скорость попета, являются окружная скорость концов лопастей, нагрузка на площадь, ометаемую лопастями несущего винта (НВ), и энерговооруженность аппарата, определяемая отношением мощности двигателя на режиме висения к весу аппарата. Окружная скорость лопастей напрямую связана с частотой вращения винта и, следовательно, передаточным числом главного редуктора, определяющим его массу. При большой частоте вращения НВ получаются более легкие главный редуктор и винт, но и более высокие динамические нагрузки на элементы системы управления. При выборе меньшей частоты вращения НВ получается тяжелый и дорогой главный редуктор и более тяжелый, но более эффективный несущий винт. На потребную мощность силовой установки вертолета влияют принятая удельная нагрузка на винт, необходимая максимальная горизонтальная скорость полета, наибольшая скороподъемность. Зачастую избыток мощности, необходимый для достижения неоправданно высоких летных характеристик, приводит к выбору более мощного и, следовательно, более тяжелого двигателя. Эго ведет к снижению массы полезной нагрузки и перерасходу топлива. Проанализировав характеристики приведенных выше беспилотных вертолетов, можно увидеть, что основным назначением рассматриваемого типоразмера является выполнение работ на малых скоростях полета при удалении от места старта не более чем на 1000 м. В этих условиях переразмеренные двигатели с большим запасом мощности уместны лишь для аппаратов, нуждающихся в высокой маневренности. На рис.4 представлены графики потребных значений энерговооруженностей на режиме висения вертолетов у земли. Сюда же нанесены значения располагаемых энерговооруженностей вертолетов из табл. 1. Относительное положение точек, соответствующих параметрам рассматриваемых вертолетов, показывает, что вертолеты 2, 3 имеют достаточный избыток энерговооруженности для обеспечения хороших летных характеристик и высокой маневренности. Эти аппараты имеют более высокую вертикальную скороподъемность и обладают необходимым избытком мощности для достижения высоких горизонтальных скоростей. Таблица 2 | Наименование ДА | Фирма страна-производитель | Масса взлетная, кг | Мощность СУ, л.с. | Масса полной нагрузки, кг | Диаметр НВ, м | Количество лопастей, шт. | Диаметр РВ, м | Количество лопастей, шт, | Скорость максимальная, км/ч | Продолжительность полета, ч | Радиус действия, км | Потолок, м | | MW-2 | Германия | 19,5 | 3,8 | 4,5 | 2,02 | 1x2 | 0,47 | 2 | 80 | 1,5 | 0,28 | 4000 | | HoverCam | Англия | 21 | 3,98 | И | 1,75 | 1x2 | 0,3 | 2 | 95 | 0,5 | 0,25 | 180 | | Heli-25 | Израиль | 25 | 6,5 | - | 2,32 | 1x2 | - | - | 80 | 2 | - | 2100 | | Z-1 | Китай | 25 | - | - | 3,25 | 1x2 | 0,65 | 2 | 111 | - | - | 4785 | | Vigilant | Франция | 32 | 8 | 8 | 1,85 | 1x2 | - | 3 | 100 | 2 | 20 | 3000 | | Sprite | Англия | 40 | 6 | 12 | 1,6 | 2x2 | - | - | 130 | 2 | 32 | 2440 | | Mi- 24D | США | 42 | 13 | - | 1,92 | 1x2 | - | - | - | - | - | - | | RPH-1 | Aerotronics, США | 45,35 | - | 13,6 | 3,05 | 1x2 | 0,99 | 2 | 109 | - | 0,5 | 3050 | | RPH-2 | Aerotronics, США | 49,9 | - | - | 3,66 | 1x2 | 0,99 | 2 | 109 | - | 0,5 | 3050 | | APID-3 | Швеция | 55 | 12,5 | 20 | 2,98 | 1x2 | 0,62 | 2 | 100 | 2 | 10 | - | | CamCopter | Sthiebel Elektronische Geraete, Австрия | 66 | 15 | 25 | 3,20 | 1x2 | - | - | 90 | 6 | 80 | 1700 | | R-50 | Yamaha, Япония | 67 | 12 | 20 | 3,07 | 1x2 | 0,520 | 2 | 80 | 0,5 | 0,15 | 100 | | Dragonfly | Aerotronics, США | 68,05 | - | 31,75 | 3,05 | 1x2 | 0,99 | 2 | 200 | - | - | 3050 | | Hind-d | Boeing, США | 74,8 | 25 | 27,2 | 3,35 | 1x3 | 0,66 | 2 | 111 | 1 | - | 3050 | | CL-227 Sentinel | Bombardier (Canadair), Канада | 190 | 50 | 45 | 2,8 | 2x3 | - | - | 130 | - | 50 | 3000 | | Ka-137 | «Камов», Россия | 280 | 48 | 50 | 5,8 | 2x2 | - | - | 175 | 4 | 265 | 5000 | | Arch-50 | Южная Корея | 300 | 83 | 62 | 4,8 | 2x2 | - | - | 150 | 0,36 | 0,2 | - | | RPH-2 | FUJI, Япония | 305 | 83,5 | 100 | 4,8 | 1x2 | 0,8 | 2 | 120 | 1 | 0,2 | - | | CL-427 | Bombardier (Canadair), Канада | 340 | 100 | - | 4 | 2x3 | - | - | 209 | 7 | - | 5500 | | CL-327 | Bombardier (Canadair), Канада | 350 | 100 | 205 | 4,01 | 2x3 | - | - | 157 | 8,5 | 200 | 5500 | | Heliot | СAC Systemes, Франция, Dragon Fly, Италиия | 450 | 105 | 205 | 6,6 | 1x2 | 1,2 | 2 | 120 | 2,5 | 50 | ' | | Vigilante | SAIC/ATI, США | 499 | 150 | 232 | 7,01 | 1x2 | | - | 251 | 13 | 200 | - | | Hynes H-2T | США | 748 | 317 | 335 | - | 1x3 | | 2 | 142 | 3 | - | 3050 | | RoboCopter | США, Япония | 794 | 168 | 295 | 8,18 | 1x3 | 1,3 | 2 | - | 1,4 | - | - | | Argus H / Priamos | Германия | 1057 | 330 | 599 | 6Д | 2x2 | | - | - | - | - | 4000 | | Seamos | Германия | 1060 | 420 | 420 | 6,1 | 2x2 | | - | 167 | 4 | 120 | - | | Helstar A/V* | Израиль | 1134 | 450 | 420 | 6,1 | 2x2 | | - | - | - | - | - | | Model-379/ Fire Scout | Northrop-Grumman, США | 1157 | - | 451 | 8,4 | 1x3 | 1,3 | 2 | - | - | - | - | | CH-84 | США | 1179 | 841 | 420 | 6,1 | 2x2 | | - | 213 | 1,75 | - | 4575 | | Hynes H-5T | США | 1225 | 454 | 420 | 7,82 | 1x3 | | 2 | 169 | 3 | - | 3660 | |