Далее период развития новых навыков – 13 лет. Стопа к этому моменту должна быть достаточно мобильна и стабильна. Время развивать контроль, выполнять специальные упражнения на нестабильной поверхности для улучшения проприоцепции, координации движений. Если до этого периода стопа развивалась гармонично, то сложно что-то испортить. Сейчас опорно-двигательный аппарат ребенка готов почти к любой нагрузке.
И, наконец, период 14-16 лет, когда идет половое созревание: важно сохранить полученные навыки и возможности своего тела. Зоны роста уже понемногу начинают закрываться, костная ткань становится более плотная, организм почти завершает свое формирование. Важно сохранить правильную технику выполнения элементов, закрепляя тысячами повторений. Нервная система становится более совершенной, следовательно, сохранять контроль постановки стопы получается все проще.
Конечно, это примерные этапы формирования стопы. Все очень индивидуально, но основные принципы физиологии развития игнорировать нельзя. Внедрение специальных упражнений с переносом массы тела на поперечный свод у детей 3-5 лет, несомненно, приведет к неприятным состояниям либо заболеваниям стопы. Так как головной мозг не готов к такой нагрузке, так как кости стопы еще мягкие и податливые – все это понемногу отложит свой отпечаток, по капельке. Но, цепляясь одно за другое, это повлияет на нормальную биомеханику движения. На взаимосвязь костей, связок, мышц, на привычные стереотипно повторяющиеся движения, что в свою очередь будет влиять на самое первое звено – структуру (анатомию).
ГЛАВА 3. Биомеханика движений стопы
Все анатомические образования (кости, связки, мышцы) собраны в единую структуру, которая позволяет выполнять определенные функции. Отдельное знание анатомических образований, конечно, необходимо, но куда важнее знать, как они друг с другом взаимодействуют.
Далее станет понятно, что тренировка отдельных мышечных групп (изолированные упражнения) не приведет к ожидаемому результату, если речь идет о качестве движения. Всю анатомию необходимо воспринимать как подвижную структуру со своими закономерностями и взаимосвязями. Взаимосвязями, позволяющими распределять коэффициенты инерции, силу гравитации и т. д.
Объяснить взаимодействие структурных элементов стопы будет проще со стороны геометрии, представленной в тенсегрити-моделях. Они достаточно хорошо описаны многими авторами. С их помощью объясняется сочетание мобильности и стабильности опорно-двигательного аппарата.
Тенсегрити-модель, в отличие от моделей сжатия и натяжения, позволяет распределять силу воздействия и остается устойчивой во внешней среде.
Сами по себе тенсегрити-модели более упругие, что позволяет им приспосабливаться к окружающему миру. При оказании давления на один из углов этой модели вся структура перестроится, чтобы адаптироваться к новым условиям. Не напоминает стопу?
Если вспомнить анатомию стопы, где мы говорили про функцию движения, позволяющую адаптироваться к поверхности, и опорную функцию, позволяющую удерживать всю массу тела, становится понятно, насколько точно тенсегрити-модель может описать биомеханику движения стопы.
Для более полного понимания разделим мышцы на синергисты и антагонисты.
Синергисты – это мышцы либо мышечные группы, выполняющие однонаправленное движение в определенном суставе. Например, передняя большеберцовая и задняя большеберцовая, они обе концентрически будут выполнять супинацию стопы – функция одной дополняет функцию другой. Антагонисты – это мышцы либо мышечные группы, выполняющие противоположное движение в определенном суставе. Например, обе большеберцовые мышцы выполняют супинацию, а обе малоберцовые мышцы выполняют пронацию стопы – функция одной мышечной группы полностью противоположна функции другой.
Тенсегрити-модель будет стабильна при выполнении нескольких условий. Во-первых, это целостность всех структурных элементов (кости, связки, мышцы), а во-вторых, баланс элементов, работающих на сжатие (кости, связки), с элементами, работающими на растяжение (мышцы-антагонисты).
Одним из принципов сохранения здоровья опорно-двигательного аппарата, стопы в том числе, является взаимоотношение мышц-антагонистов. Как мы уже знаем, это мышцы, выполняющие противоположную функцию. Есть даже такое понятие, как «пара сил». То есть мышцы-антагонисты должны быть примерно равной силы, или получится, что одна мышечная группа будет «перетягивать» другую, и это нарушит принципы тенсегрити, что приведет к потере стабильности структуры. Следовательно, это негативно скажется на функции того или иного региона тела.
Если же описывать модель стопы проще, необходимо сделать акцент на возможные движения стопы и голеностопного сустава и определить те самые тенсегрити-модели на конкретных примерах.
Голеностопный сустав имеет одну степень свободы, то есть в нем возможно движение только в одной плоскости. И это будет сгибание и разгибание стопы относительно костей голени.
Сгибание в голеностопном суставе мы будем называть flex, когда расстояние между костями голени и стопой уменьшается. А разгибанием будет pointe, когда это расстояние увеличивается. Но, что интересно, на стопе движения пальцев и движения в суставах стопы будут называться наоборот. Сгибание пальцев (вытягивание) будет называться pointe, а разгибание пальцев (сокращение) – flex. Это особенность обозначения движения в суставах.
Объем движений зависит от нескольких факторов. Во-первых, это костные ограничители, во-вторых, натяжение связок и, в-третьих, мышечный фактор.
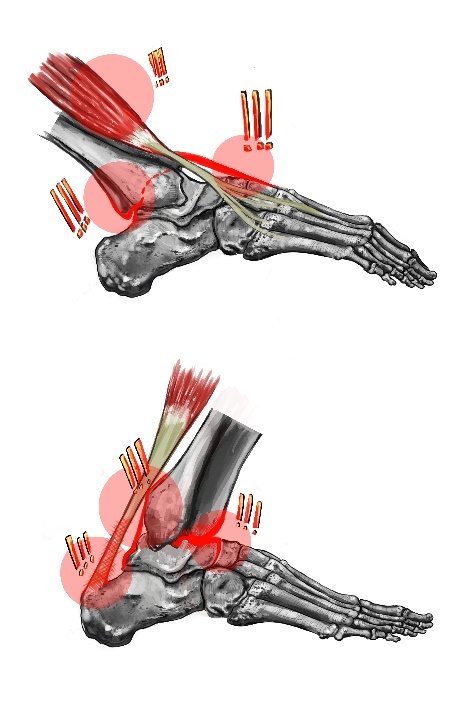
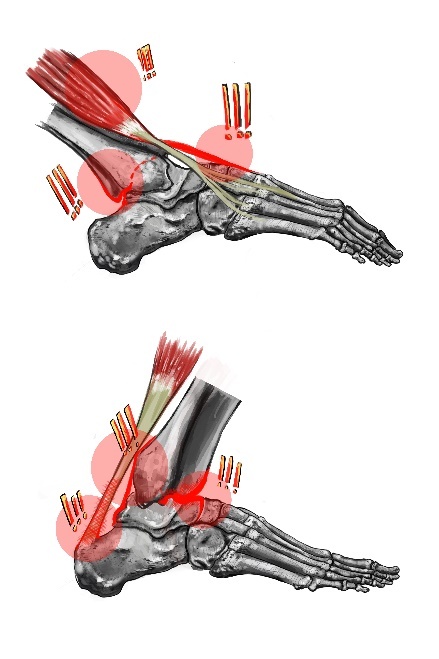
Сгибание в голеностопном суставе может ограничиваться за счет костного контакта между таранной и большеберцовой костями, также за счет натяжения капсульно-связочного аппарата и за счет повышения мышечного тонуса икроножной мышцы (рис. 18).
Разгибание в голеностопном суставе, то есть вытягивание стопы, может ограничиваться за счет костного контакта, но тут уже задний край большеберцовой кости контактирует с таранной костью, ограничивая дальнейшее движение. Точно так же как и в сгибании, разгибание может ограничить капсульно-связочный аппарат, но уже в передней поверхности сустава. И повышенный мышечный тонус мышц-сгибателей стопы, расположенных на передней и наружной поверхности голени (рис. 16).
Рисунок 16 – Факторы, ограничивающие сгибание и разгибание в голеностопном суставе
Если мы вспомним строение голеностопного сустава, то зададимся интересным вопросом: «Почему голень состоит из двух костей?» Все очень просто: это необходимо, чтобы подстраиваться под строение тарана. Таранная кость имеет неравномерную суставную поверхность, которая чуть шире спереди и уже сзади. Это сделано для того, чтобы обеспечить повышенную стабилизацию голеностопного сустава при повышении осевой нагрузки во время шага. Когда происходит максимальное сгибание в голеностопном суставе, таранная кость под силой оказываемого давления прижимается к берцовым, тем самым немного раздвигая их, так как ее передний край более широкий. Эта конструкция очень стабильна и является результатом тысячелетней адаптации к прямохождению. Но когда стопа разгибается, контакт между берцовыми и таранной костью становится меньше из-за сокращения ее задней части. И тут в работу включается задняя большеберцовая мышца, которая берет свое начало от обеих берцовых костей и направляется через голеностопный сустав к стопе. Тут ее функция очень важна, так как она начинается от обеих костей голени и активно участвует в разгибании стопы (вытягивании) вместе с трехглавой мышцей голени. Результатом ее сокращения будет сближение костей голени при разгибании голеностопного сустава, тем самым берцовые кости будут плотно обхватывать таранную (рис. 17).