Возможность применения для выполнения различных технологических операций и использования для работы с различными предметами производства в пределах одного или разных конструктивно-технологических классов достигается в результате применения:
–универсальных, широкодиапазонных и антропоморфных захватных устройств (в том числе за счет ручной перенастройки на детали разных размеров и использования сменных вкладышей и накладок);
–перенастраиваемых (в том числе автоматически) технологических головок;
–многоцелевых технологических головок, обеспечивающих выполнение нескольких технологических операций (например, головок, работающих с использованием методов электромагнитного или вихревого ориентирования деталей);
–автоматической смены захватных устройств и инструментов в соответствии с классом предметов производства и требованиями технологической операции.
Удобство технического обслуживания, замены и ремонта. Необходимо предусмотреть легкость и безопасность контрольного осмотра рабочего органа, возможность быстрой замены непрочных и изнашиваемых элементов конструкции, а также сменных деталей (накладок, вкладышей, пальцев). В целях уменьшения числа инструментов, требуемых для технического обслуживания, в конструкции рабочего органа по возможности следует использовать один и тот же тип крепежных деталей.
Классификация захватных устройств ПР проводится по нескольким принципам. Захватные устройства (ЗУ), или захваты, относятся к группе комплектующих изделий промышленных роботов. По принципу действия все ЗУ принято укрупненно подразделять на три группы: механические, вакуумные, магнитные, рис. 3.15.
Рис. 3.15. Классификация захватных устройств ПР по принципу действия
В приведенную классификацию дополнительно введены ЗУ с эластичными камерами, которые относят к группе универсальных захватов, и прочие ЗУ, к которым можно отнести, например, бесконтактные струйные и электростатические захваты. Рассмотрим другие частные классификации ЗУ по наиболее важным классификационным признакам.
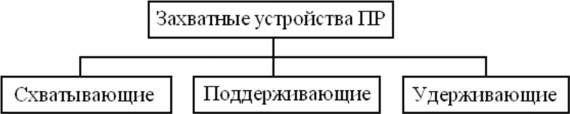
По способу удержания объекта, рис. 3.16.
Рис. 3.16. Классификация захватных устройств ПР по способу удержания объекта
Схватывающие ЗУ удерживают объект благодаря кинематическому воздействию рабочих элементов (губок, пальцев, клещей) с помощью сил трения или комбинации сил трения и запирающих усилий. Все схватывающие ЗУ активного типа подразделяются на две группы: механические (клещи, тиски, шарнирные пальцы) и с эластичными рабочими камерами, деформирующимися под действием нагнетаемого внутрь сжатого воздуха или жидкости.
В поддерживающих ЗУ для удержания объекта используют нижнюю поверхность, выступающие части объекта или имеющиеся в его корпусе отверстия. К таким ЗУ относят крюки, петли, вилки, лопатки и захваты питателей, не зажимающие заготовки.
Удерживающие ЗУ обеспечивают силовое воздействие на объект благодаря использованию различных физических эффектов. Наиболее распространены вакуумные и магнитные ЗУ. Реже встречаются ЗУ, использующие эффект электростатического притяжения, адгезии и др.
По способу действия выделяют ЗУ: не приводные (например, с использованием пружины) и приводные (наличие какого-либо привода для срабатывания захвата).
По поверхности захватывания объекта: наружные (для захвата валов, корпусов, пластин) и внутренние (для захвата втулок, колец, шайб и т. п.).
По виду управления ЗУ подразделяются, рис. 3.17.
Рис. 3.17. Классификация захватных устройств ПР по виду управления
Неуправляемые —пружинные механические устройства с постоянными магнитами или с вакуумными присосками без принудительного разрежения. Для снятия объекта с таких ЗУ требуется усилие большее, чем усилие его удержания.
Командные ЗУ управляются только командами на захватывание или отпускание объекта. К этой группе относят ЗУ с пружинным приводом, оснащаемые стопорными устройствами и срабатывающие через такт. Разжимаются и зажимаются губки пружинных ЗУ благодаря взаимодействию их с объектом манипулирования.
Жесткопрограммируемые ЗУ управляются сигналами системы управления ПР. Величина перемещения губок, взаимное расположение рабочих элементов, усилие зажима в таких ЗУ могут меняться по программе, которая может управлять и действием технологических приспособлений.
Адаптивные ЗУ —программируемые устройства, оснащенные различными датчиками внешней информации (определения формы поверхности, массы объекта, усилия зажима, наличия проскальзывания объекта относительно рабочих элементов ЗУ).
По характеру крепления ЗУ к руке манипулятора выделяют следующие виды ЗУ, рис. 3.18.
Несменяемые ЗУ —устройства, являющиеся неотъемлемой частью конструкции руки манипулятора, замена которых не предусматривается.
Рис. 3.18. Классификация захватных устройств ПР по характеру крепления ЗУ к руке манипулятора
Сменные – устройства, представляющие собой самостоятельные узлы с базовыми поверхностями для крепления к руке манипулятора.
Быстросменные ЗУ —сменные, у которых конструкция базовых поверхностей для крепления ЗУ к манипулятору обеспечивает их быструю смену (например, исполнение в виде байонетного замка).
Пригодные для автоматической смены ЗУ —устройства, у которых конструкция базовых поверхностей обеспечивает возможность их автоматического закрепления на руке манипулятора.
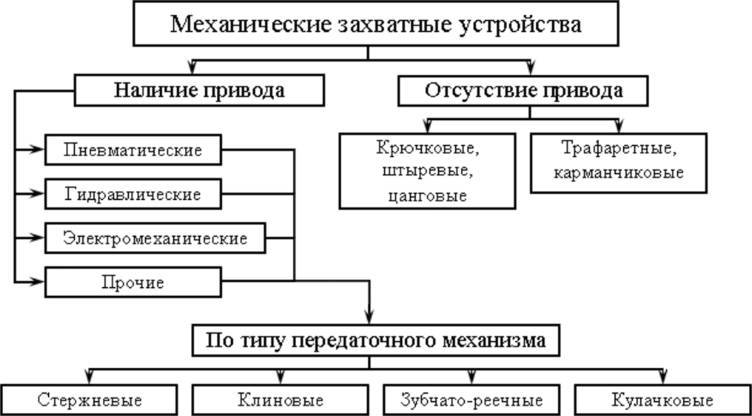
Поскольку в машиностроении широкое распространение получили ПР с механическими захватами, приведем классификацию механических ЗУ по наличию и типу привода и типу передаточного механизма, рис. 3.19.
Рис. 3.19. Классификация механических захватных устройств ПР
В ней выделены две группы ЗУ: приводные и неприводные. По типу механизма, передающего усилие от привода к зажимному органу, представлены четыре группы.
Из множества схем механизмов передачи усилий в захвате на практике чаше всего используются схемы плоских механизмов с одним двигателем и одной степенью свободы для захватывания призматических (любого сечения) и плоских объектов.
В случае длинномерных объектов они обеспечивают захватывание одного сечения. Простейшими являются схемы с прямой передачей, в которых единственный подвижный рабочий элемент жестко связан со штоком пневмоцилиндра и поэтому перемещается по его оси. Введение объекта в зону между рабочими элементами осуществляется вдоль вертикальной оси.
Из механизмов с несколькими степенями подвижности наиболее распространены механизмы с двумя выходными звеньями, симметрично расположенными и симметрично перемещающимися относительно средней плоскости. В схеме с простейшим шарнирно-рычажным механизмом осуществляется преобразование линейного горизонтального движения штока пневмоцилиндра во вращательное движение верхнего рабочего элемента. Введение объекта в зону между рабочими элементами осуществляется вдоль горизонтальной оси (обычно выдвижением руки).
Очень распространены схемы клещевых захватов, в которых выходные звенья вращаются симметрично относительно горизонтальной оси вокруг неподвижных осей в противоположные стороны. Все эти схемы выполнены так, чтобы сжатие губок захвата осуществлялось при подаче давления в бесштоковую полость пневмоцилиндра. Общим недостатком клещевых захватов является вращение рычагов. При жестком закреплении на них рабочих элементов не может быть обеспечено захватывание плоских предметов различной толщины, поэтому клещевые ЗУ чаще используются для захватывания цилиндрических объектов.