7
8
9
10
11
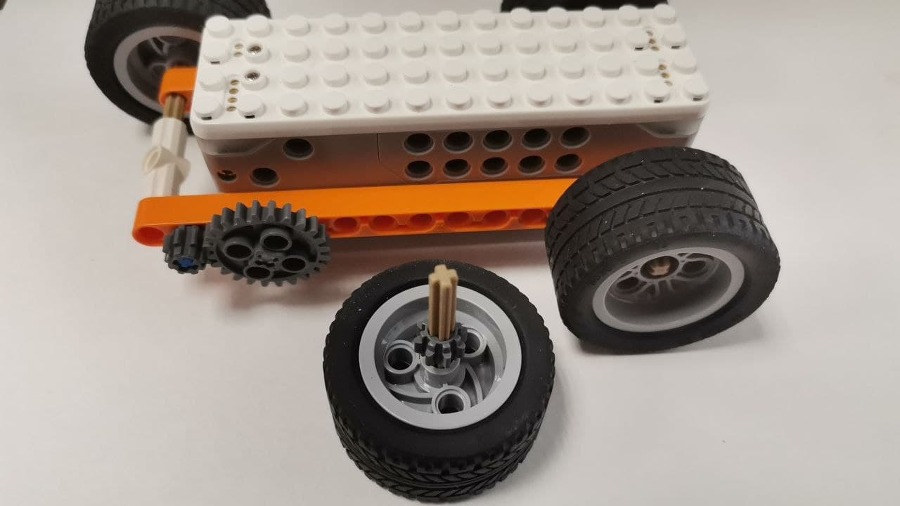
Проверь, чтобы у собранной модели свободно ходили колеса. Если колеса не ходят свободно, отодвинь их немного от модели.
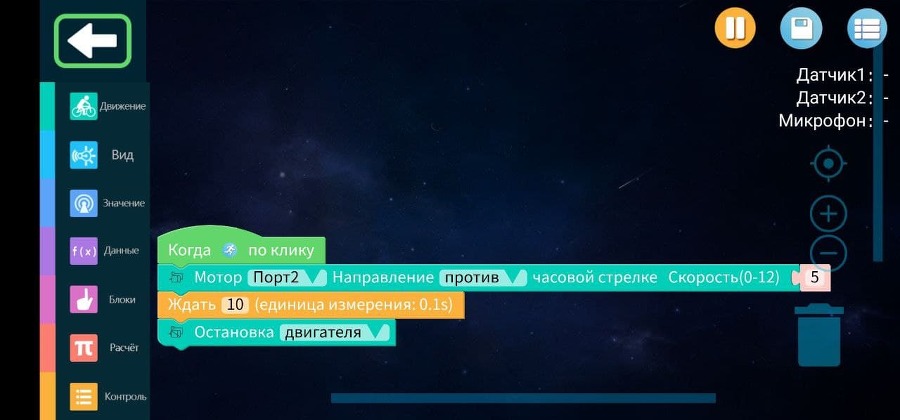
Составь программу и измерь расстояние, которое проедет машина за время её выполнения (приблизительно за 1 секунду). Для этого зайди во вкладку «Код» и выбери кнопку «Создать»
Нажми на значок «Плюс» в левом нижнем углу экрана. В появившемся окошке набери представленный ниже код:
Команды «Мотор» и «Остановка двигателя» находятся во вкладке «Движение». Команда «Ждать» находится во вкладке «Контроль». Чтобы выставить время движения 1 секунду, необходимо в команде ждать поставить цифру 10. Чтобы запустить программу, необходимо нажать на кнопку с бегущим человечком справа в верхней части экрана.
Сохрани эту программу, она пригодится в дальнейшем, нажав на значек дискеты справа вверху экрана.
Поставь свою машину на старт и запусти программу. Когда программа закончит свою работу, и машина остановится, измерь расстояние, которое машина проехала с помощью линейки. Обозначь это расстояние S1 и запиши его. Проведи еще два таких же эксперимента.
Измени модель, заменив ведущее 24-зубое шестерню, на 8-зубое, немного модернизировав конструкцию. Как мы выяснили в прошлом уроке, если поставить в зацепление две одинаковых шестерни, то скорость от этого не изменится, но изменится направление вращения. Воспользуемся этим свойством.
1
2
3
4
5
6
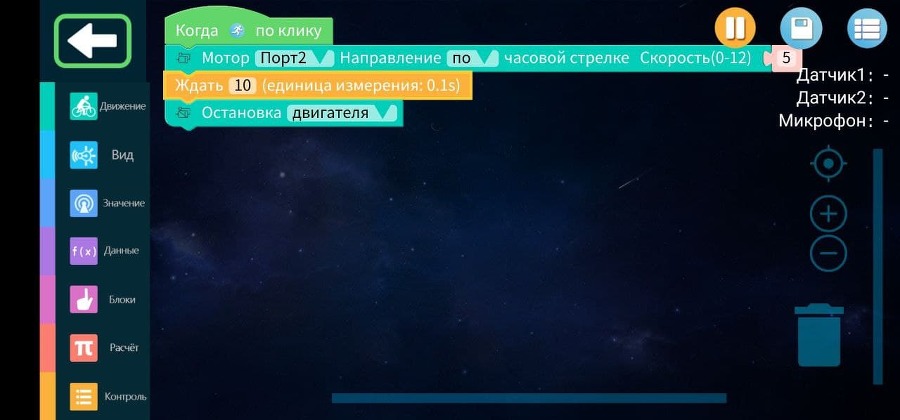
Так как мы добавили шестерню, необходимо поменять программу. В команде «Мотор» сделай направление по часовой стрелке.
Снова запусти программу и измерь расстояние, пройденное моделью.
Запиши результат в S2. Проведи еще два таких же эксперимента.
Поменяй местами зубчатые колеса и повтори эксперимент.
Запиши пройденный путь в S3. Проведи еще два таких же эксперимента.
Сравни полученные результаты.
В каком эксперименте машина двигалась быстрее?
_______________________________________________________________
В каком медленнее?
_______________________________________________________________
Найди отношение:
S3 к S2 ________________________
S2 к S1 ________________________
Сравни полученные числа. Сделай вывод.
___________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Сохрани результаты. Они нам понадобятся в следующем проекте.
А теперь вспомни, во сколько раз у 24-зубой шестерни больше зубьев, чем у 8-зубой?
_______________________________________
Полученное значение называется передаточным числом. По этому числу легко определить, какой выигрыш в скорости мы получим.
А теперь догадайся, в каком эксперименте мы использовали повышающую, а в каком понижающую передачу.
_______________________________________________________________________________________________________________________________________________________________________________________________________
Задание 2 (творческое)
Используй детали набора, чтобы придать машине привлекательный вид.
Например, такой:
Организуй показательный забег своих автомобилей.
Проект 3. Механика. Ременная передача. Скорость
Цель:
1) закрепить понятия: повышающая и понижающая передача, цилиндрическая зубчатая передача, скорость движения;
2) познакомиться с понятиями: ременная передача, шкив, передаточное число ременной передачи;
3) выяснить, какая передача, цилиндрическая зубчатая, используемая в прошлом проекте, или ременная даст наибольший выигрыш в скорости.
Общие сведения:
Ременная передача, возможно, была одной из первых передач, которую применил человек. Менялся материал для изготовления ремня и шкивов, но неизменным оставалось передаточное отношение (число), определяемое как результат деления числа оборотов ведущего и ведомого вала (шкива). Точно также, как определяется передаточное число цилиндрической зубчатой передачи.
Как и в случае с простыми механизмами, нет точных сведений, когда они были изобретены. Известно, что уже в 1500 году до н.э. у ассирийцев были подъемные механизмы на основе канатов и блоков. Первые письменные описания устройства подъемного крана, использующего блоки, встречаются в трактате римского архитектора Витрувия, написанного в I веке до н.э.
Конец ознакомительного фрагмента.
Текст предоставлен ООО «ЛитРес».
Прочитайте эту книгу целиком, купив полную легальную версию на ЛитРес.
Безопасно оплатить книгу можно банковской картой Visa, MasterCard, Maestro, со счета мобильного телефона, с платежного терминала, в салоне МТС или Связной, через PayPal, WebMoney, Яндекс.Деньги, QIWI Кошелек, бонусными картами или другим удобным Вам способом.