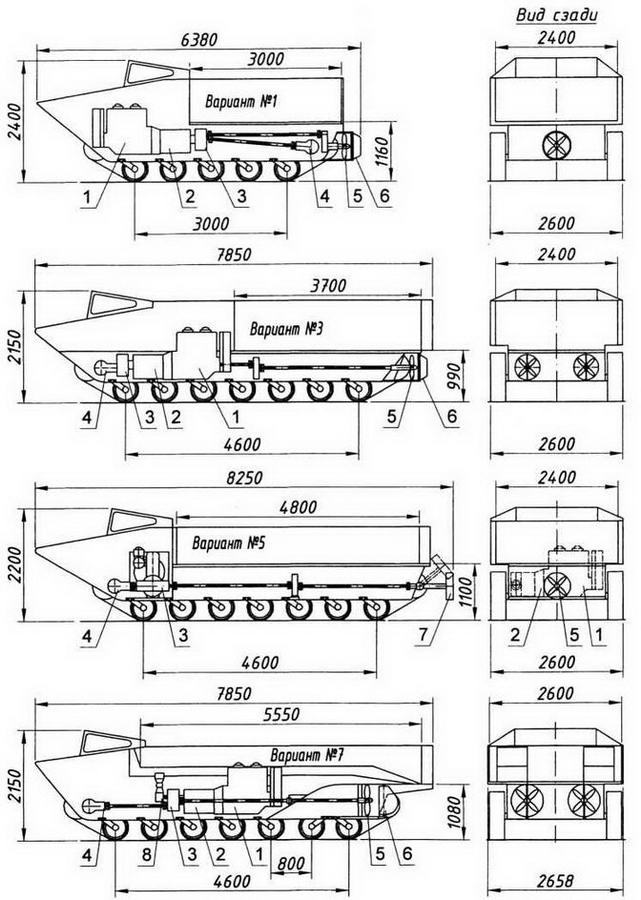
Исходя из этого А. Кравцев предложил второй вариант компоновки. При ширине выбранного трака 300 мм ширина колеи машины получалась 2,3 м, а максимально допустимая длина опорной поверхности — 4,6 м. Особенностью второго варианта стали уменьшение погрузочной высоты транспортера до 450 мм и размещение гребных винтов в тоннелях над гусеницами. При перевозке грузов массой 3 т транспортер имел бы заметный дифферент на корму, что улучшало условия работы гребных винтов. Но при движении порожняком переднее расположение моторно-трансмиссионного отделения (МТО) приводило бы, наоборот, к дифференту на нос и зарыванию машины в воду. Неудовлетворительной получалась эпюра распределения давления ходовой части незагруженного транспортера на грунт, что отрицательно влияло на скорость его движении по суше.
В третьем варианте компоновки удалось получить размеры грузовой платформы 3,7x2,4 м, оставив МТО в передней части. Гребные винты перекочевали в корму машины, погрузочная высота при этом увеличилась до 950 мм. Винты работали в лучших условиях, чем во втором варианте, но и при таком расположении не исключалось их повреждение. Центровка транспортера с грузом улучшилась, однако порожняком транспортер двигался на воде с большим дифферентом на нос. Несмотря на то, что ширина грузовой платформы увеличилась, она все же не позволяла перевозить автомобили ЗИС-151 и ГАЗ-63.
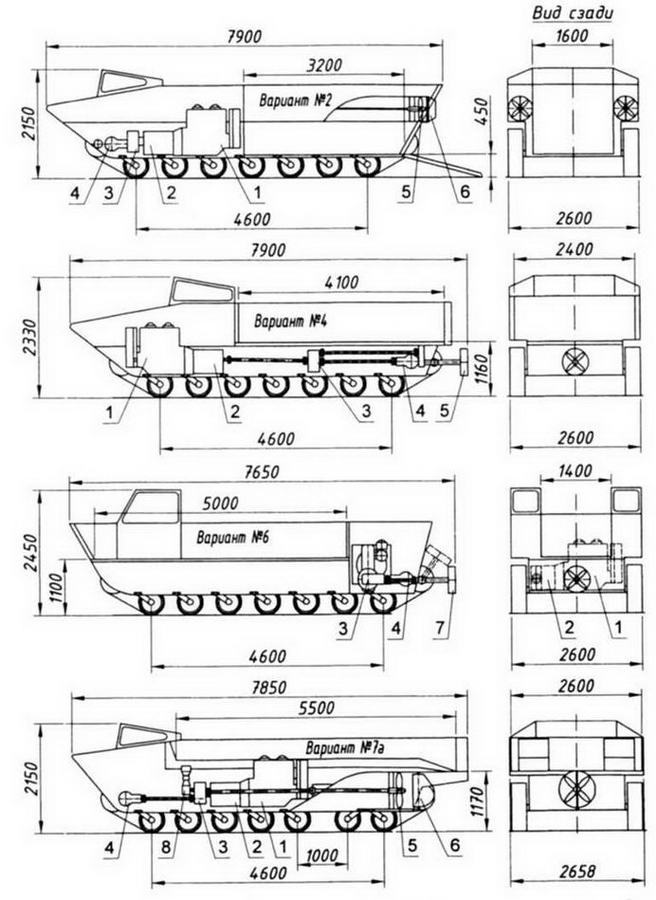
В четвертом варианте двигатель занял место впереди, трансмиссия расположилась под центром грузовой платформы, а бортовая передача с ведущими звездочками — в корме. Гребной винт в кольцевой насадке установили на консоли кормы. Управление на воде осуществлялось отклонением насадки от продольной оси. В походном положении консоль приподнималась. Этот вариант компоновки позволил довести длину грузовой платформы до 4,1 м, что обеспечило использование транспортера для переправы 76-мм и 85-мм пушек и автомобиля ГАЗ-67. Улучшилось распределение нагрузок по опорной поверхности, существенно удалось снизить дифферент на нос при движении незагруженного транспортера на воде.
В пятом варианте компоновки А. Кравцев развернул МТО поперек корпуса машины, как на танке Т-44. В результате длина грузовой платформы увеличилась до 4,8 м. Винт с кольцевой насадкой на консоли был вынесен за корму. Но компоновочное решение, удачное для танка, оказалось неприемлемым для плавающего транспортера: по сравнению с предыдущим вариантом резко ухудшилось распределение нагрузок по опорной поверхности, нос получился перегруженным, плавание незагруженной машины стало практически невозможным.
Варианты компоновочных схем плавающего гусеничного транспортера:
1 — двигатель: 2—коробка передач; 3—распределительная коробка; 4—бортовая передача;
5—гребной винт; 6—перо руля; 7—гребной винт в поворотной насадке; в—водооткачивающий насос
Кравцев Анатолий Федорович 23.12.1911 — 15.08.1986
Полковник-инженер Кравцев Анатолий Федорович, лауреат Государственной премии, кандидат технических наук. В 1930-х годах им были созданы приспособления для преодоления танками водных преград, устройство для авиатранспортировки танкетки Т-27, телеуправляемые танки-подрывники, воздухоочистители типа кциклон• и •мультициклон• для двигателей танков Т-34 и КВ. После окончания Великой Отечественной войны в Особом конструкторском бюро Инженерных войск под руководством А.Ф. Кравцева были разработаны гусеничный плавающий транспортер К-61, танконосец К-69, гусеничный самоходный паром К-71, авиадесантная самоходная установка К-73, плавающий танк К-90 и плавающий бронетранспортер К-78. После ухода в отставку А.Ф. Кравцев преподавал в МАДИ, активно участвовал в работе студенческого конструкторского бюро.
В шестом варианте МТО сдвинули к корме, хотя двигатель и трансмиссия, как и в предыдущем случае, размещались поперек корпуса, гребной винт в насадке установили на поворотной консоли. Экипаж располагался впереди в двух отдельных кабинах, загрузка транспортера производилась через носовую аппарель. Но опять-таки обнаружились существенные недостатки. Удалось увеличить длину грузовой платформы еще на 300 мм, но ширина ее уменьшилась до 1,4 м, что позволяло переправлять только личный состав и артсистемы. При спуске с крутого берега машина могла зачерпнуть воду через переднюю аппарель из- за недостаточной в этот момент плавучести. Переднее расположение грузовой платформы заставило для безопасного движения на воде установить развитый волноотбойник, который ухудшал и без того плохой обзор с места механика-водителя.
После анализа еще нескольких других вариантов стало ясно, что для переправы через водные преграды тяжелых артсистем, автомобилей типа «Студебеккер» и ЗИС-151 грузовая платформа транспортера должна быть длиной не менее 7 м (при максимальной его ширине 3,15 м), то есть составлять 90% от его длины. Это привело к появлению очередного — седьмого варианта компоновки со следующими параметрами: общая длина — 7,85 м, ширина колеи — 2,3 м, размеры грузовой платформы — 5,55x2,6 м МТО находилось в центре машины под грузовой платформой, гусеницы приводились в движение звездочками, расположенными в носовой части, два гребных винта и рули устанавливались в тоннелях в корме машины. Привод винтов и гусениц осуществлялся карданными валами, проходящими под настилом грузовой платформы. Экипаж транспортера при этом должен был располагаться под погруженным на него автомобилем. Такое компоновочное решение ранее нигде не использовалось. Все дальнейшие проработки велись А. Кравцевым в этом направлении.
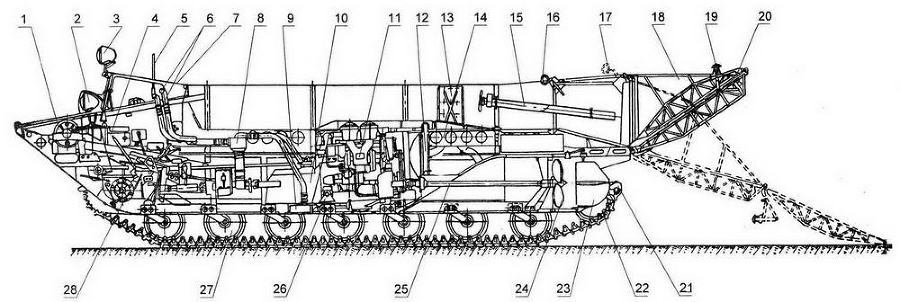
Компоновка транспортера К-61:
1— барабан лебедки; 2—фара ФГ-1А2; 3—фара-прожектор; 4—радиостанция ЮРТ-12; 5—антенна радиостанции; 6—выходные патрубки откачивающей системы; 7—брезентовый тент кабины (рабочее положение); 8—водооткачивающий насос; 9—водозаборник насоса; 10—коробка передач; 11 — двигатель ЯАЗ М-204В; 12—радиатор; 13—кожух выхлопной системы; 14—балка настила; 15—ручной водооткачивающий насос; 16—ручка откидного борта с тягой (положение при закрытом борте); 17—ручка откидного борта (положение показано пунктиром при откинутом борте); 18—откидной борт (ранний вариант с трубчатой фермой); 19—штырь-фиксатор артсистем; 20—откидная аппарель (ранний вариант ферменной конструкции); 21 — буксирный прибор; 22—ленивец; 23—перо руля; 24—гребной винт; 25—вал гребного винта; 26—опора двигателя; 27—опорный каток; 28—главная передача
Проблемы конструктора
Проекты А. Кравцева по созданию гусеничного плавающего транспортера нашли поддержку у армейского командования, и для продолжения исследований приказом заместителя министра Вооруженных Сил СССР № 093 от 3 декабря 1947 года создается Особое конструкторское бюро Инженерных войск (ОКБ ИВ).
После определения основной компоновочной схемы и габаритных параметров машины в ОКБ приступили к решению следующей, не менее важной задачи — созданию кузова: легкого, прочного, герметичного, с вместительной грузовой платформой, приемлемой гидродинамикой, технологичного в производстве, надежного в эксплуатации.
Поскольку отечественного аналога не существовало, а сведения о зарубежных машинах были крайне скудны, свои поиски коллективу А. Кравцева пришлось начать практически с нуля: отсутствовали теоретические исследования гидродинамики гусеничных и колесных плавающих машин, методики расчета и технологии изготовления тонкостенных металлических конструкций таких размеров; не было практического опыта перевозки транспортерами по суше и на воде артиллерийских систем и автомобилей массой около 5 т с большими динамическими нагрузками, погрузки, разгрузки и швартовки перевозимой техники; не существовали эксплуатационные требования к конструкции, срокам службы и ремонтопригодности амфибийной машины.