На луноходе установлены две телевизионные системы: малокадровая и панорамная.
Известно, что распространение радиоволн от Земли до Луны составляет почти 1,3 с. Телеизображение с Луны до Земли идёт также 1,3 с. В сумме уже 2,6 с. Анализ ситуаций и учёт времени исполнения команды управляющими органами показал, что минимальное общее время задержки составляет около 4,1 с.
В этом заключалось принципиальное отличие в процессах управления транспортным средством (ТС): в одном случае, когда ТС управляется оператором, находящимся непосредственно на нём, и в другом - когда управление ТС осуществляется оператором, находящимся на значительном расстоянии от него.
Тогда в космической технике и появился новый термин - система дистанционного управления (СДУ).
Выбор рациональной структуры СДУ был не прост, так как эта система замыкалась на человека с его психикой, свойственной ему реакцией, способностью к анализу и другими особенностями, которыми характеризуется мыслящая личность.
Одним из необходимых требований к СДУ является условие распознавания препятствий и возможность своевременной остановки перед ними или их объезда.
Передача телевизионного изображения, как это принято для обычного вещательного стандарта (25 кадров в секунду при чёткости 625 строк), мог быть осуществлён только по высокоскоростной радиолинии между луноходом и ПУЛом. Но такой технической возможности тогда не было.
Для управления движением лунохода специалисты систем радиоуправления и космической связи НИИ-885 при активном участии A.C. Селиванова предложили применить малокадровую телевизионную систему (МКТВ). Сотрудниками Всесоюзного НИИ электролучевых приборов (ВНИИ ЭЛП, г. Ленинград) под руководством одного из ведущих разработчиков Александром Григорьевичем Лапуком была создана новая оригинальная трубка-видикон с регулируемой памятью (ВРП). В НИИ-885 сотрудники лаборатории Владимира Александровича Тимохина, применив принцип работы ВРП, создали для лунохода бортовую телевизионную камеру, позволявшую сохранять на видиконе изображение лунной поверхности в течение времени, пока осуществлялась его развёртка в режиме телевизионного вещательного стандарта [34].
Электромеханический затвор имел основную выдержку 1/25 с, что позволяло избежать искажения изображений во время движения лунохода.
Передача изображений на Землю производилась на более низких скоростях в одном из четырёх режимов: 3,2; 5,7; 10,9 и 21,1 с одного кадра. Выбор режима осуществлялся по радиокомандам с Земли. При этом чёрно-белая фотография («картинка») на мониторах наземных устройств напоминала сменяющиеся друг друга кадры диафильма и была не самого высокого качества (чёткость падала до 350-400 строк, а на краях поля - до 300 строк). В верхнем углу каждого снимка фиксировался его номер и время получения.
Наземные устройства обратного преобразования были разработаны сотрудниками кафедры телевидения Московского электротехнического института связи (МЭИС), руководимой профессором С.И. Катаевым. В этой работе участвовали и сотрудники НИИ-885 A.C. Селиванов, Ю.М. Тучин, O.E. Малючков и др. [15].
Малокадровая телевизионная система состоит из двух передающих камер, установленных на одном уровне на высоте 950 мм, и одного моноблока с элементами электроники и автоматики. Угол зрения камеры составлял около 50° в горизонтальной плоскости и 38°- в вертикальной, поэтому нижняя граница зоны видимости начиналась с 1,2 м. Одна из камер расположена по продольной оси лунохода, другая - правее на 400 мм (по ходу движения), что позволяло получать стереопары телевизионных снимков с этой базой. Обычно работает один полукомплект (одна камера и часть моноблока), другой находится в резерве. В случае выхода из строя одной из камер можно будет перейти на другую. Другим ограничением скорости движения аппарата являлось периодичность предъявления каждого кадра телевизионного изображения. С момента обнаружения препятствия для дальнейшего движения было необходимо, чтобы это препятствие находилось в зоне видимости ещё не менее чем в 2-3 кадрах телевизионного изображения (в зависимости от установленного режима). В противном случае водитель мог потерять ориентировку на местности и наехать на препятствие.
Специфика же управления заключалась:
♦ в отсутствии непосредственного восприятия оператором процесса самого движения;
♦ в затруднённом восприятии местности по телеэкрану;
♦ во временных задержках при выдаче на борт радиокоманд и при приёме оттуда телевизионного изображения и телеметрической информации;
♦ наконец, в зависимости характеристик подвижности самоходного шасси от условий рельефа и физико-механических свойств лунного грунта.
Эти особенности потребовали наличия определённых навыков и психофизических качеств. К первым относились способность оперировать пространственными представлениями в отрыве от управляемого ТС и умение оценивать обстановку с упреждением во времени для компенсации временных задержек в системе управления. Ко вторым - хорошая память, способность к длительному вниманию, быстрота реакции и осмысления информации, умение по телевизионному изображению оперативно оценивать конкретную обстановку, определять расстояние до препятствий и их размеры, выбирать рациональный маршрут движения ТС и принимать решение по методу его управления.
В настоящее время в мировой практике управления инопланетным ТС применяется термин телеоператорное управление.
Панорамная телевизионная система предназначена для топографической съёмки местности, исследования её структуры, а также для наблюдения Земли и Солнца.
Четыре панорамные телефотокамеры типа Я-198, аналогичные тем, которые применялись на «Луне-9» и «Луне-13», для лунохода были модифицированы и попарно (вертикального и бокового обзора) установлены по левой и правой сторонам приборного отсека.
Чёткость изображения такой системы раз в десять выше, чем чёткость изображения на экране ВКУ. Это позволяет применять её в навигационных целях, а также и для проведения морфологических и топографических исследований лунной поверхности. Панорамные камеры работают только во время стоянок лунохода и передают изображения неподвижных объектов окружающей местности.
У камеры вертикального обзора (астротелефотометра) сечение телесного угла 360° на 30°. Принимаемое от неё изображение называют астропанорамой. Вращаясь подобно аттракционному «колесу обозрения», она фиксирует всё, что находится впереди лунохода, под ним, сзади и вверху. В поле зрения этих камер попадали передние и задние колёса, что позволяло оценить характер их взаимодействия с грунтом. Также они могли в определённых случаях зафиксировать положение Солнца и Земли на небосводе, что использовалось при решении навигационных задач.
К каждой камере был пристроен специальный оптический прибор - датчик лунной вертикали (определитель местной вертикали -ОМВ). Он представлял собой стеклянную чашу с нанесённой на её внутренней поверхности радиальной калибровочной шкалой, по которой свободно перемещался металлический шарик. Его нахождение соответствовало положению лунохода на поверхности. Изображение ОМВ являлось обязательной частью астропанорамы.
Камера бокового обзора с сечением телесного угла 180° на 30° фиксирует все объекты, находящиеся по левую (правую) стороны.
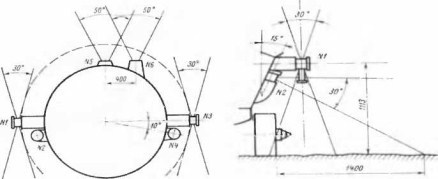
Рис. 34. Расположение камер телефотометров (№ 1,2,3,4) относительно передних камер малокадрового ТВ (№5 и№6)
Одной из их функций является обеспечение безопасного схода лунохода с посадочной ступени. По принимаемым изображениям телевизионной курсовой камеры водитель из-за т.н. «мёртвой зоны» (1,2 м) не видит передние колёса и раскрытые трапы, не может оценить расположение их концов на лунной поверхности и отсутствие препятствий для схода, обстановку слева и справа и, тем более, позади лунохода.
По принятым панорамам вертикального и бокового обзора местности штурман оперативно составляет топографическую схему места посадки, по которой выбирается наиболее благоприятное направление схода и первоначального движения лунохода.