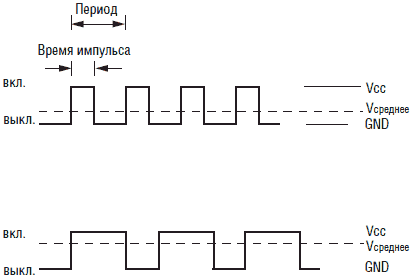
Рис. 4.18. Широтно-импульсная модуляция (ШИМ) для управления мостовой схемой
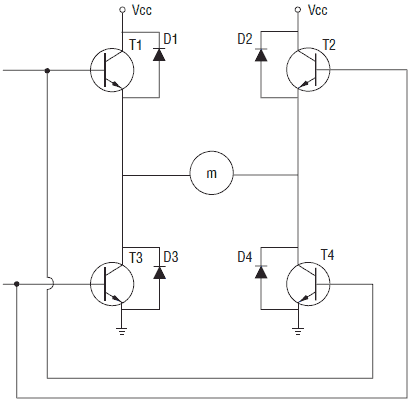
Двигатель является индуктивной нагрузкой. В моменты включения/выключения возникающее переходное напряжение, генерируемое обмотками двигателя, может повредить полупроводниковые части моста. Для гашения этого напряжения используются защитные диоды, включенные параллельно транзисторам, как показано на рис. 4.19.
Рис. 4.19. Транзисторная мостовая схема с защитными диодами
Защитный диод гасит обратное переходное напряжение на землю, что эффективно защищает переход транзистора, к которому подключен диод. Защитные диоды должны быть рассчитаны на нормальный ток, потребляемый двигателем.
Глава 5
Сенсорика
Сенсорика роботов (система чувствительных датчиков) обычно копирует функции органов чувств человека: зрение, слух, обоняние, осязание и вкус. Чувство равновесия и положения тела в пространстве, как функция внутреннего уха, иногда считаются шестым чувством. Функционирование биологических органов чувств базируется на принципе нейронной активности, в то время как чувствительные органы роботов имеют электрическую природу. Возможны возражения, что на самом деле обе эти группы имеют электрическую природу, основанные на указании, что нейронные и электрические цепи имеют общее электрохимическое происхождение. Тем не менее, нейронная сенсорика функционирует иначе, чем просто электрическая. По этой причине для устранения разночтений мы определим сенсорику робота, как имеющую электрическую природу.
Для полной имитации биологических органов чувств необходимо использование нейронных чувствительных устройств (сенсоров). Примером такого нейронного сенсора является человеческое ухо, работу которого мы рассмотрим. Характеристика человеческого уха нелинейна. Его реакция на звуковой раздражитель носит логарифмический характер. Это означает, что десятикратное повышение уровня звукового сигнала вызывает двукратное повышение субъективного уровня громкости. Для сравнения, обычный приемник звуковых сигналов, например микрофон, имеет линейную выходную характеристику. Отсюда десятикратное повышение уровня выходного сигнала, подаваемого на компьютер, микроконтроллер или иную схему, соответствует десятикратному увеличению звукового сигнала.
Сенсорные датчики могут обнаружить какие-то внешние сигналы и определить их величину, что выражается в появлении на выходе пропорционального электрического сигнала. Информация, содержащаяся в сигнале, должна быть считана и обработана «интеллектом» робота (например, ЦПУ) или нейронной сетью. Мы можем характеризовать искусственные сенсоры по их отношению к природным органам чувств, но обычно классы сенсорных устройств выделяются по типу воздействия, на которое данный сенсор реагирует: свет, звук, тепло и т. д. Типы сенсоров, встроенных в робота, определяются целями и местом его применения.
Обработка сигналов
При выборе типа сенсорного устройства, используемого в роботе, необходимо решить вопрос чтения и обработки сигнала, поступающего от него. Vjui Многие сенсоры представляют собой датчики резистивного типа, что означает, что их сопротивление меняется в зависимости от количества поступающей энергии. Если такой датчик является частью делителя напряжения, то амплитуда выходного сигнала окажется пропорциональной количеству поступающей энергии.
Если для робота необходимо действительное значение интенсивности поступающей энергии, необходимо использовать аналого-цифровой преобразователь (АЦП). АЦП измеряет входной электрический сигнал и выдает соответствующий ему двоичный код.
Для правильной работы и преобразования данных АЦП необходим микроконтроллер или цифровая схема. Во многих случаях использование АЦП не является необходимым. В некоторых случаях достаточно использовать компаратор.
Как следует из самого названия, компаратор сравнивает два электрических напряжения. Одно из напряжений называется опорным и устанавливается по нашему желанию. Другое напряжение выдается сенсорным датчиком (через делитель напряжения). Выход компаратора имеет два уровня – высокий и низкий. Высокий уровень соответствует +5 В, низкий уровень – 0 В.
Выходной сигнал компаратора зависит от соотношения уровней напряжений на его двух входах. Возможны три состояния: напряжение датчика меньше опорного напряжения, равно ему или превосходит его.
Пример построения компаратора
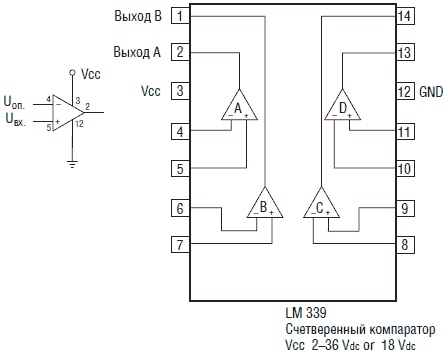
Лучшим способом познакомиться с работой компаратора является использование его в схеме. Посмотрев на рис. 5.1, вы сразу обнаружите, что компаратор выглядит почти так же, как операционный усилитель. Это действительно так; компараторы представляют собой специализированные операционные усилители (ОУ). Компаратор, использованный в первом примере, представляет собой счетверенный компаратор типа LM339. Эта интегральная схема состоит из четырех компараторов и заключена в корпус с 14 выводами. Аналогично ОУ компараторы имеют инвертированный и неинвертированный входы. В данном случае опорное напряжение подается на инвертированный вход (-).
Рис 5.1. Схема компаратора и счетверенный компаратор на ИС LM 339
Делитель напряжения
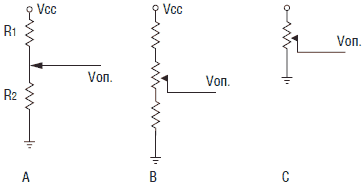
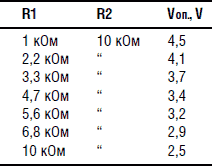
Делитель напряжения представляет собой простой, но очень важный элемент схемы. Его использование позволяет состыковать большинство резистивных сенсорных датчиков с входом компаратора. Опорное напряжение получается также с помощью делителя напряжения на двух резисторах 10 кОм (см. рис. 5.2А). Voп. в данном случае будет равно 2,5 В, т. е. половине питающего напряжения 5 В (см. табл. 5.1). Понятно, что величина Voп. может быть любой в пределах от нуля до напряжения питания и зависит от отношения сопротивлений делителя напряжения.
Vоп.=Vпит.хR2/(R1+R2)
где Vпит.=5 В.
Рис. 5.2. Делители напряжения А, В и С
Таблица 5.1. Двухрезисторный делитель напряжения
Для создания переменного делителя напряжения можно использовать переменный резистор, как показано на рис. 5.2В и 5.2С. Я предпочитаю схему 5.2А как самую простую.
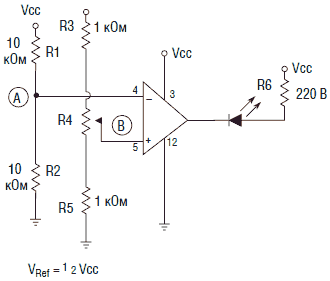
Схема для проверки работы устройства приведена на рис. 5.3 Вместо сенсорного датчика мы будем использовать два постоянных резистора в 1 кОм и переменный резистор 5 кОм. Переменным резистором можно регулировать величину напряжения, поступающего на неинвертированный вход. Выход компаратора обычно представляет собой NPN транзистор с открытым коллектором, выходной ток которого более чем достаточен для подключения светодиода, который мы будем использовать в качестве индикатора. Говоря иначе, выход компаратора может быть использован как электронный ключ, замыкаемый на землю. Это окажется полезным позднее при коммутации таймера типа 555.
Рис. 5.3. Схема проверки работы компаратора
После сборки схемы посмотрим, что будет происходить. Когда входное напряжение меньше опорного Vоп., на выходе компаратора будет присутствовать низкий уровень 0 В, через светодиод будет протекать ток, что вызовет его свечение. Если мы с помощью переменного резистора повысим напряжение Vвх. до уровня, превышающего Voп. уровень выхода перебросится в положение «высокий», и светодиод погаснет. Можно проверить работу компаратора вольтметром, измеряя значения напряжений на инвертированном и неинвертированном входах.
Многие, и я в том числе, находят работу подобной схемы несколько неестественной. Более привычным является зажигание светодиода при превышении Vвх. над Voп. Это можно легко сделать, поменяв местами подключения входов компаратора, т. е. присоединив Vвх. к инвертированному входу компаратора, а Voп. к неинвертированному соответственно. Функция выхода изменится при этом на противоположную.