Объем нитиноловой проволоки при сокращении до уровня 10 % остается постоянным. По мере сокращения ее диаметр пропорционально возрастает, обеспечивая постоянство объема.
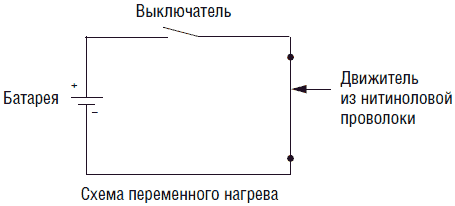
Наиболее простым способом нагревания нитиноловой проволоки является пропускание через нее электрического постоянного тока (см. рис. 4.2) Однако длительное пропускание постоянного тока может привести к разрушению проволоки в силу ее неравномерного омического нагрева. Повреждений проволоки при нагревании и поддержании в нагретом состоянии можно избежать, использую широтно-импульсный источник постоянного тока.
Рис. 4.2. Бабочка с нитиноловой проволокой
Некоторые конструкторы роботов используют нитиноловую проволоку в приводе безмоторного шестиногого движущегося робота. Робот действительно способен передвигаться, но делает это крайне медленно, поскольку для цикла нагревания и охлаждения нитиноловой проволоки требуется значительное время. Конструкция такого шестиногого «ползающего» робота очень легка (он весит несколько унций), однако он имеет достаточную мощность, чтобы нести «на себе» собственный источник питания.
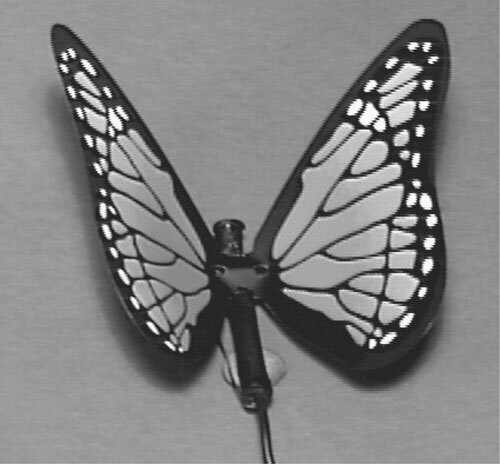
Для шестиногих «ползающих» роботов использование нитинола в качестве привода вряд ли оправдано, однако он находит много других интересных применений в конструкциях роботов. Для того чтобы подробнее ознакомиться с замечательными свойствами этого материала, посмотрим, как используется способность нитинола к сокращению в некоторых коммерческих игрушках. На рис. 4.3 изображена механическая бабочка, крылья которой приводятся в движение нитиноловой проволокой. В качестве интересной иллюстрации принципов робототехники, такая бабочка может быть присоединена к источнику питания на основе солнечной батареи.
Рис. 4.3. Бабочка с нитиноловой проволокой
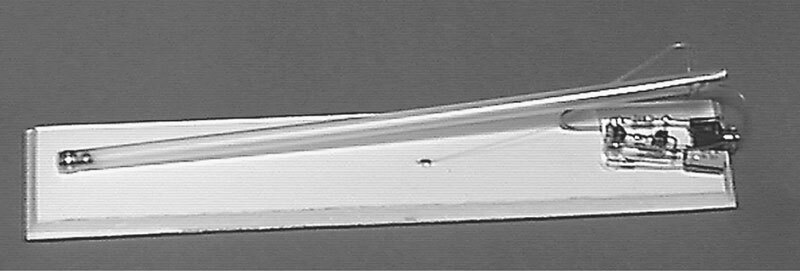
На рис. 4.4 изображено демонстрационное устройство – движущийся шарик. Нитиноловый привод совершает в день около 20.000 циклов и способен работать многие годы.
Рис. 4.4. Модель шара-ракеты
Петли из нитиноловой проволоки могут быть использованы для создания вращения. На рис. 4.5 изображен такой простой «тепловой» движитель. Каждое колесико имеет паз, в котором находится нитиноловая проволока. Для лучшей теплопроводности меньшее колесо изготовлено из латуни. Когда меньшее колесо помещено в воду – оно начинает вращаться. Подобный тепловой движитель может работать и от солнца. Если сфокусировать на маленьком колесе лучи солнца с помощью 3 – дюймовой лупы, то устройство начнет работать.
Рис. 4.5. Тепловой двигатель
Нитинол также может быть использован в механических выключателях кнопочного типа, например в качестве привода небольших воздушных клапанов или в других механизмах, требующих линейных перемещений.
Соленоиды
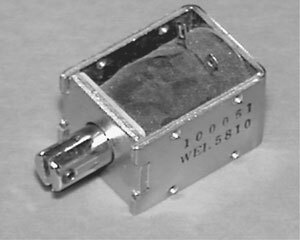
Соленоид представляет собой электромеханическое устройство (рис. 4.6). Стандартный соленоид имеет обмотку с проводом и внутренний подвижный металлический сердечник. При подаче напряжение магнитное поле обмотки втягивает или выталкивает сердечник. Сердечник может быть механически соединен с частями робота, требующими перемещения.
Рис. 4.6. Соленоид
Кольцевые соленоиды
Кольцевой соленоид отличается от обычного тем (см. рис. 4.7), что вместо линейного он производит вращательное движение. Кольцевой соленоид может быть использован в конструкции робота-рыбы (см. гл. 13).
Рис. 4.7. Кольцевой соленоид
Шаговые двигатели
Шаговые двигатели могут использоваться для передвижения, перемещения, управления рулевым механизмом и позиционирования. Такие устройства находят применение в качестве интегрированных компонентов многих коммерческих и промышленных систем, управляемых компьютерами. В домашних персональных компьютерах шаговые двигатели можно обнаружить в приводах дисководов и в принтерах.
Уникальность шаговых двигателей в том, что ими можно управлять с помощью цифровых устройств. Такие двигатели могут осуществлять повороты на точно заданный угол. Это свойство делает шаговые двигатели идеальными для задач линейного и кругового позиционирования. Широкое использование шаговых двигателей в промышленности обуславливает широкий ассортимент моделей по форме, размерам и иным свойствам (см. рис. 4.8А).
Рис. 4.8А. Шаговый двигатель
При подаче напряжения на стандартный электрический двигатель его ротор начинает непрерывно вращаться. Скорость и фаза вращения ротора являются функцией напряжения, нагрузки на двигатель и времени. Определение точной фазы (положения) ротора в этом случае невозможно.
В отличие от этого, питание шагового двигателя осуществляется серией электрических импульсов, подаваемых на обмотки двигателя. Каждый импульс, поданный на обмотки, поворачивает ротор на строго определенный угол. Такой поворот называется шагом, отсюда двигатель получил название шагового.
Не существует единой величины шага для шаговых двигателей; выпускаются устройства с различными углами поворота на один шаг (импульс). Номинальная величина такого шага зависит от характера применения двигателя. Величины углов поворота обязательно указаны в спецификации устройства. Можно найти шаговые двигатели с углами поворота от долей градуса (например, 0,72°) до десятков градусов (например, 22,5°)
Схема управления шагового двигателя
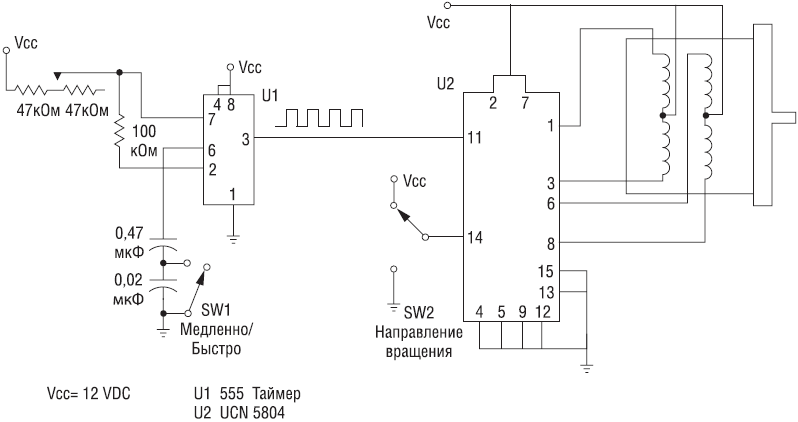
На рис. 4.8В показана схема управления шагового двигателя. Используется однополярный двигатель с шестью выводами. ИС U1 представляет собой управляемый напряжением таймер серии 555, который в режиме генерации выдает прямоугольные тактовые импульсы на вывод 3. ИС U2 типа UCN5804 является контроллером шагового двигателя. Тактовые импульсы, поступающие на вывод 11 ИС UCN5804, поворачивают ротор шагового двигателя, причем каждому импульсу соответствует один шаг поворота. Повышение частоты тактовых импульсов приводит к увеличению скорости вращения шагового двигателя.
Рис. 4.8В. Шаговый двигатель – схема управления
В данной несложной схеме тактовые импульсы производятся таймером серии 555. Такие импульсы можно генерировать с помощью микроконтроллера (см. гл. 6) или светочувствительного нейрона (см. гл. 5). Переключатель SW1 изменяет диапазон тактовых импульсов медленно/быстро. Переключателем SW2 можно изменить направление вращения ротора двигателя.
Шаговые двигатели можно использовать для создания робота-платформы (см. гл. 10).
Сервомоторы
Сервомоторы представляют собой двигатели постоянного тока, снабженные редукторами и системой обратной связи контроля положения. В любительских целях подобные моторы используются для контроля положения органов управления в радиоуправляемых моделях. Вал такого мотора может поворачиваться или удерживаться на углах не менее 90° от среднего положения.
В силу широкого использования таких устройств в самодельных конструкциях, их выпускаемый ассортимент достаточно разнообразен (см. рис. 4.9). Существуют большие сервомоторы, используемые в промышленности, но они достаточно дороги для любительского применения. В этой книге мы будем использовать небольшие и недорогие моторчики для любительских целей.