Измерение направления
Направление отсчитывается от курсовой линии – вертикальной линии на экране, совпадающей с диаметральной плоскостью судна. При наличии сопряженных с радаром магнитного компаса или гирокомпаса, отсчет азимута может осуществляться от магнитного или истинного направления на Север.
Измерение направления может осуществляться по положению цели на градусной сетке, с помощью курсора (аналогично показанному выше измерению дальности) либо с использованием линии электронного маркера пеленга EBL.
Первый способ дает большие ошибки измерения направления на цель и используется при судовождении для грубой оценки положения судна относительно цели.
Электронный маркер пеленга (EBL) – это исходящая из центра экрана линия (иногда называемая «линия электронного пеленга»), положение которой может управляться оператором. С помощью органов управления наводят маркер на середину отметки, после чего считывают высвеченные в углу экрана значения азимута, либо получают их по шкале направлений, находящейся на краю экрана.
Определение координат
При сопряжении радара с приемником спутниковой навигации или приемоиндикатором радионавигационных систем «Лоран» или «Дека», он может определять и высвечивать на экране широту и долготу выбранных целей.
Масштабирование
В современных радарах имеется возможность выделения отдельных участков и просмотра их в увеличенном масштабе на экране одновременно с наблюдением общего радиолокационного изображения. Для этого курсором выделяют диапазоны детального просмотра по дальности и азимуту и включают режим масштабирования.
Автоматическое сопровождение целей
При расхождении в условиях плохой видимости с одним судном с использованием радара задача решается довольно просто. Однако, в районах с интенсивным судоходством, когда на экране присутствует много отметок от движущихся и неподвижных целей, задача становится трудновыполнимой для судоводителя и светлое время суток.
Для облегчения распознавания целей на экране радиолокатора и маневрирования при большом количестве судов был создан т. н. «атоматический радар-плоттер» (АРП или ARPA), берущий на себя эту задачу. На современных радарах АРП – это небольшая плата, встраиваемая, при необходимости, в его дисплей.
Распознавание целей осуществляется путем анализа изменения их положения за определенное время, точнее, за определенное количество обзоров и привязки их к своим трассам движения. Выделенным целям автоматически присваиваются номера, которые выводят на экран вместе с целями, их траекториями и векторами скорости.
Многооконный режим
Помимо решения основных задач – обнаружения и определения координат целей – современные радиолокаторы обладают набором функций, существенно расширяющих их возможности.
Характерной особенностью современных радаров является многооконный режим работы дисплея. Помимо основного радиолокационного изображения в нижней части экрана располагаются т. н. «Data Boxes»-окна, в которых находится навигационная информация, получаемая от связанных с радаром датчиков – компаса, приемника GPS, эхолота, лага, а также данные о положении на экране курсора и маркеров направления и дальности.
С помощью дополнительных экранных окон можно выделить сектор контроля, положение курсора, а при сопряжении с приемником GPS – характерные для навигатора данные – истинную скорость и направление движения, путевые точки и расстояния до них, получить графическое изображение «Hayway», используемое в приемниках GPS для судовождения по путевым точкам и маршрутам.
Интерфейс
Интерфейс судовых радиолокаторов позволяет использовать их в составе навигационных систем, имеющих единый международный протокол обмена NMEA 0183 или «фирменный» протокол, например, упоминавшийся ранее Sea Talk, что позволяет сопрягать их с различными навигационными приборами и получать от них дополнительную информацию.
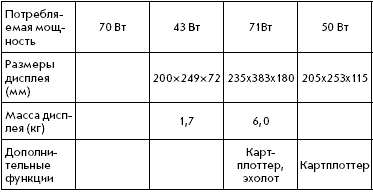
В прилагаемой ниже таблице приведены основные характеристики некоторых наиболее распространенных портативных радиолокаторов.
Интегральные навигационные системы
Последним достижением судовой радиоэлектроники стало создание интегральных навигационных систем. Такие системы объединяют в себе функции нескольких различных приборов. Ранее уже упоминалось о эхолотах-приемниках GPS, об эхолотах-картплоттерах.
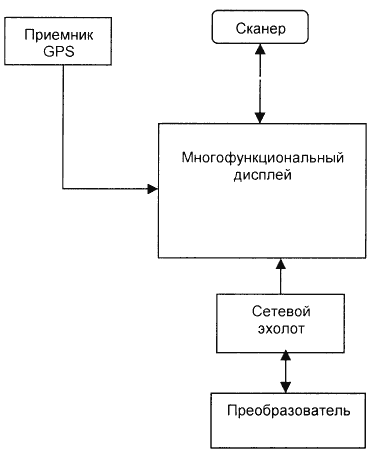
Последние разработки ряда производителей позволили объединить в одном приборе практически все судовые навигационные устройства – радар, картплоттер, эхолот, приемник навигационных и метеоданных и факс для приема метеокарт. Такие системы обычно включают основной блок – многофункциональный дисплей и набор опций. Такое построение позволяют создавать разные конфигурации систем в соответствии с потребностями (а также возможностями) владельца. Так, добавление к дисплею радиолокационного сканера превращает его в радар, добавление приемника GPS – в картплоттер, приемопередатчика и гидроакустического преобразователя – в рыбопоисковый или в навигационный эхолот (рис. 73).
Рис. 73. Простейшая конфигурация интегральной системы
Все составляющие системы работают на один экран, при этом на нем может создаваться только одно изображение – радиолокационное, карта, подводное пространство, либо отображаться одновременно в многооконном режиме в различных комбинациях – радар, эхолот, картплоттер-эхолот, радар-картплоттер, причем, радиолокационное и карта могут отображаться раздельно или с наложением друг на друга.