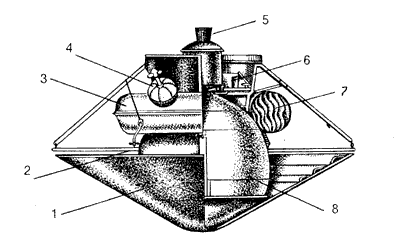
Рис. 8. Спускаемый аппарат станции «Марс-2»: 1 — аэродинамический конус; 2 — антенна радиовысотомера; 3 — парашютный контейнер; 4 — двигатель ввода вытяжного парашюта; 5 — двигатель увода спускаемого аппарата; 6 — приборы и аппаратура системы управления; 7 — основной парашют; 8 — автоматическая марсианская станция
В конце участка аэродинамического торможения по команде, последовавшей от датчика перегрузок, еще при сверхзвуковой скорости полета с помощью порохового двигателя был введен вытяжной парашют. Спустя 1,5 с с помощью удлиненного заряда разрезался торовый в виде баранки парашютный отсек, и верхняя часть отсека (крышка) была уведена от спускаемого аппарата вытяжным парашютом. Крышка, в свою очередь, ввела основной парашют с зарифленным куполом. Стропы основного парашюта крепились за связку твердотопливных двигателей, которые уже крепились непосредственно к спускаемому аппарату.
Когда аппарат затормозился до околозвуковой скорости, то по сигналу от программно-временного устройства была проведена разрифовка — полное раскрытие купола основного парашюта. Спустя 1–2 с был сброшен аэродинамический конус и открылись антенны радиовысотомера системы мягкой посадки. За время спуска на парашюте в течение нескольких минут скорость движения снизилась примерно до 60 м/с.
На высоте 20–30 м по команде, поступившей от высотомера, был включен твердотоплпвный тормозной двигатель мягкой посадки и был отцеплен верхний твердотопливный двигатель увода вместе с основным парашютом. Последний увел в сторону парашют, чтобы его куполом не был бы закрыт спускаемый аппарат. Спустя некоторое время двигатель мягкой посадки выключился, и спускаемый аппарат, отделившись от парашютного контейнера, опустился на поверхность. При этом парашютный контейнер с двигателем мягкой посадки с помощью двигателей малой тяги был уведен в сторону. В момент посадки специальное амортизационное покрытие надежно защитило спускаемый аппарат от возможных повреждений.
В ходе этого космического эксперимента впервые была применена оригинальная система связи. Сигнал со спускаемого аппарата, находящегося на поверхности планеты, шел на искусственный спутник Марса — станцию «Марс-3», которая после разделения со спускаемым аппаратом и включения двигателя вышла на орбиту вокруг Марса. На спутнике запоминались сигналы, переданные с Марса. Потом, спустя некоторое время, эти сигналы уходили на Землю.
СПУСКАЕМЫЙ АППАРАТ СТАНЦИИ «ВИКИНГ»
Автоматические космические станции «Викинг» предназначались для проведения исследования планеты Марс как с орбиты искусственного спутника Марса, так и с помощью спускаемого аппарата, доставленного на поверхность планеты. Масса каждой из двух станций составляла 3620 кг, из них на спускаемый аппарат приходилось 1120 кг. После подлета к Марсу космическая станция «Викинг» с помощью двигательной установки была переведена на орбиту искусственного спутника Марса с целью изучения планеты и подбора места посадки спускаемого аппарата.
Вслед за принятием на Земле решения по выбору места посадки был проведен сброс биологической оболочки спускаемого аппарата. Аппарат в этой оболочке находился после проведения стерилизации при подготовке к запуску еше в земных условиях. Такие меры были предприняты, чтобы исключить занос земных микроорганизмов на Марс. Через 1,5 ч после сброса биологической оболочки спускаемый аппарат отделился от станции.
Спускаемый аппарат был сориентирован, и через 30 мин включились 8 жидкостных ракетных двигателей на торможение. Орбита спускаемого аппарата стала эллиптической, опускаясь в перицентре в глубь атмосферы планеты. Скорость входа в атмосферу при этом составляла 4,6 км/с при угле входа 16,5°. Лобовой экран, защищавший спускаемый аппарат от высоких температур, был сконструирован и закреплен на спускаемом аппарате с таким расчетом, чтобы создавалось аэродинамическое качество 0,18.
После аэродинамического торможения на высоте 6 км при скорости 1,9 М (несколько более 600 м/с) была введена парашютная система. Ввод ее, как и на советских станциях «Марс», проводился с помощью порохового двигателя. Через 15 с отстреливался лобовой экран на высоте примерно 4,4 км. При достижении высоты 1,2 км и скорости порядка 113 м/с парашют отделялся. На этом кончался участок торможения с использованием атмосферы и начинался участок торможения с применением двигательной установки.
Двигательная установка с тягой 270 кг/с включалась на 25–40 с, а при достижении высоты 15 м тяга дросселировалась (уменьшалась). На уменьшенной тяге спуск продолжался до высоты 3 м. На этой высоте двигательная установка выключалась и спускаемый аппарат свободно падал на поверхность Марса. Скорость соударения составляла 1,5 — 3,3 м/с. Из 1120 кг массы, отделившейся от станции, на поверхность опускался аппарат массой 577 кг. Окончательное гашение скорости происходило с помощью опор, аналогичных применяемым для аппаратов, опускавшихся на лунную поверхность.
ИССЛЕДОВАНИЯ ПРИ ЖЕСТКОЙ ПОСАДКЕ
Такие космические аппараты, естественно, не предназначены для осуществления мягкой посадки на исследуемую планету и проводят изучение планеты с небольшого расстояния при полете к ней. На начальном этапе космонавтики, когда спускаемые аппараты только разрабатывались или находили первое применение на космических аппаратах, предназначенных для возврата на Землю, исследование других тел Солнечной системы уже можно было проводить с подлета. Первыми такими аппаратами стали «Луна-1» и «Луна-2».
Для фотографирования Луны с близкого расстояния использовались станции «Луна-3» и «Зонд-3». В последующем такими станциями были «Луна-12» и ряд аппаратов серии «Зонд».
В американской программе исследования Луны с подлетной траектории использовались космические аппараты «Рейнджер», которые позволили получить снимки лунной поверхности с высот от 1800 км до 480 м за 0,12 с до удара и гибели аппарата. Передача снимков, полученных с помощью шести телевизионных, камер, осуществлялась с помощью двух передатчиков.
ЗАКЛЮЧЕНИЕ
В начальный период освоения космоса были созданы относительно простые спускаемые аппараты, для торможения и уменьшения скорости которых использовалась, атмосфера планет, без использования подъемной силы, т. е, при этом спуск не был управляемым. Это были спускаемые аппараты шаровой либо иной формы с центром масс, расположенным на продольной оси. Накопленный опыт позволил усложнить спускаемые аппараты как конструктивно, так и с точки зрения насыщения системами управления спуском.
В настоящее время в земных условиях для обеспечения посадки человека, возвращающегося из космического полета, применяются более совершенные спускаемые аппараты с использованием подъемной силы для управления спуском. Для космических исследований остальных планет с атмосферой, пока еще не посещаемых человеком, до сих пор применяются (за редкими исключениями) автоматические станции со спускаемыми аппаратами, которые производят спуск по баллистической траектории.
Такой неуправляемый спуск применяется с целью, уменьшения затрат на создание спускаемых аппаратов. Кроме того, это делается потому, что такие спускаемые аппараты более надежны в эксплуатации, нежели спускаемые аппараты с управляемым спуском, на которые необходимо устанавливать дополнительные системы и элементы управления. Правда, при этом приходится мириться с большими перегрузками, достигающими 100 g и более.
В будущем, с развитием космонавтики, при полетах человека к другим планетам возникнет необходимость создания для этого спускаемых аппаратов с управляемым спуском. И даже в случае только облета этих планет с последующим возвращением на Землю потребуется создание новых спускаемых аппаратов. При скоростях входа в атмосферу более 17 км/с управление только по углу крена с постоянным, углом атаки при подлетных коридорах входа шириной порядка 12–16 км практически невозможно обеспечить приемлемые величины перегрузок.