СПУСК В ОТСУТСТВИЕ АТМОСФЕРЫ
При современном состоянии космонавтики практически мягкую посадку в отсутствие атмосферы осуществляли пока только на Луну. Но принципиально такие спускаемые аппараты возможно доставлять на Меркурий, на спутники Марса, безатмосферные спутники других планет, а также на астероиды. Отметим, что, чем меньше масса тела Солнечной системы, тем с меньшими затратами топлива возможна посадка на его поверхность.
Спускаемые аппараты, предназначенные для мягкой посадки в отсутствие атмосферы, не покрывают теплозащитным слоем, а одевают, как правило, только в «шубу» экранно-вакуумной теплоизоляции для защиты от лучистой энергии Солнца и предохранения от глубокого охлаждения в космосе с теневой стороны аппарата. Парашют для данного типа спускаемого аппарата также не применим, поскольку купол нечем наполнить в вакууме. Поэтому для предотвращения удара о поверхность планеты применяют единственное средство — ракетный двигатель, способный погасить большую скорость до незначительных величин, порядка нескольких метров в секунду.
В этом случае посадка космического аппарата напоминает старт ракеты, только все происходит в обратном порядке. Двигатели, исторгающие из сопел пламя, не увеличивают скорость движения, а уменьшают ее, и с этой целью сопло двигателя обращено в сторону направления движения. Причем работа двигательной установки обеспечивает не только уменьшение скорости спускаемого аппарата до нулевой относительно цели, но и компенсирует силу притяжения тела Солнечной системы.
Тормозной двигатель должен снизить скорость аппарата до величины нескольких метров в секунду, причем окончание торможения должно совпасть с моментом приближения к поверхности планеты, иначе спускаемый аппарат в результате свободного падения снова разовьет большую скорость. Анализ различных схем торможения показал, что для первых экспериментов наиболее надежен вариант торможения при вертикальном снижении станции, позволяющий упростить систему посадки.
Теоретически эту задачу решить просто: по известным величинам силы притяжения планеты, силе тяги двигателя и скорости движения космического аппарата до торможения рассчитывают расстоятгие до поверхности планеты, при достижении которого космическим аппаратом нужно включить двигательную установку. Но практически определить, когда включать двигательную установку для торможения, не просто. Сколько километров осталось лететь до планеты — спросить не у кого, верстовых столбов в космосе не поставлено. Приходится ставить на космический аппарат высотомер, проще говоря, радиолокатор, с помощью которого можно определять расстояние до поверхности планеты.
В соответствии с программой, рассчитанной заранее и заложенной в память космического аппарата, по достижении нужной высоты над поверхностью от высотомера приходит команда на включение двигательной установки. Однако до включения двигательной установки необходимо направить двигатель соплом вниз. Правда, понятий «верх» и «низ» в открытом космосе нет. Обычно для крупных небесных тел, таких, как звезды, планеты, «низ» связывается с их центром, но для малых тел, например астероидов, «низ» и «верх» определяются только из направления к центру притяжения.
Поэтому для посадки на тело, не имеющее атмосферы, надо сопло двигательной установки развернуть по направлению силы притяжения и включить установку в такой момент, чтобы при соприкосновении с поверхностью скорость была близка к нулевой. Развернуть космический аппарат по направлению силы притяжения можно, лишь определив положение космического аппарата относительно цели и направление его движения. Только тогда определяют величину необходимого импульса для проведения коррекции с целью правильного выполнения траектории спуска. Использование законов небесной механики и проведение необходимой коррекции траектории полета позволяют направить космический аппарат в центр видимого диска тела или в любую другую заданную точку посадки.
Разворот спускаемого аппарата в требуемом направлении для проведения торможения можно сделать с использованием системы ориентации. С помошью оптических датчиков этой системы определяют направление на Солнце или на опорную звезду. Решая тригонометрическую задачу, находят затем направление на центр планеты относительно направления на Солнце и направления на звезду. И наконец, система управления разворачивает аппарат в требуемое положение.
Промежуток времени от включения двигателя до посадки рассчитывается заранее при проектировании космического аппарата, а расстояние до планеты определяется с помощью радиовысотомера. В зависимости от массы аппарата выбирается и величина силы тяги двигателя, и высота, на которой должно произойти его включение. Как и для спускаемых аппаратов, осуществляющих спуск в атмосфере, в данном случае спасается не весь космический аппарат, а только его часть. В момент включения двигательной установки лишние отсеки, т. е. уже не нужные на участке посадки, сбрасываются. Это блоки системы астроориентации, необходимые только для перелета с Земли до исследуемого тела, а также использованные химические источники тока и др. Для примера отметим, что у «Луны-9» масса этих сбрасываемых отсеков была соизмерима с массой автоматической лунной станции, опустившейся на Луну.
Все это делается с целью уменьшить количество топлива, необходимого для торможения космического аппарата. Но для контроля за движением космического аппарата надо периодически определять его скорость. Скорость по инерции замерить нельзя. Однако при включении двигателя космического аппарата, появляется ускорение. В этом случае с помощью гироскопического интегратора можно измерить скорость движения путем интегрирования линейных ускорений. Правда, при этом узнается не истинная скорость космического аппарата, а только величина изменения скорости, возникающая от работы двигательной установки.
Для решения этой проблемы электронно-вычислительная машина, опрашивая высотомер, получает данные по высоте, а от интегратора получает значения приращения скорости в моменты, соответствующие определению расстояния до поверхности планеты высотомером. Затем электронный мозг по заложенной программе вырабатывает рекомендации на дросселирование или форсирование двигательной установки, если значения фактической скорости отличаются от расчетного значения, заложенного в память ЭВМ.
Посадка спускаемого аппарата на поверхность после окончания работы двигательной установки осуществляется падением с небольшой высоты под действием притяжения планеты. Амортизация удара о поверхность с целью снижения перегрузок на аппарат, как правило, осуществляется на всех спускаемых аппаратах с помощью трех или четырех опор, имеющих индивидуальные амортизаторы.
Лишь первые лунные аппараты «Луна-9» и «Луна-13» осуществляли посадку спускаемого аппарата иначе.
СПУСКАЕМЫЕ АППАРАТЫ СТАНЦИЙ «ЛУНА-9», «ЛУНА-13»
До совершения посадки космического аппарата на лунную поверхность о ее свойствах были самые противоречивые сведения. По одним данным лунная поверхность представляла собой скалистые горные пустыни, по другим «моря» и материки Луны считались покрытыми толстым слоем пыли, в которой могли утонуть любые космические аппараты, осмелившиеся опуститься на се поверхность.
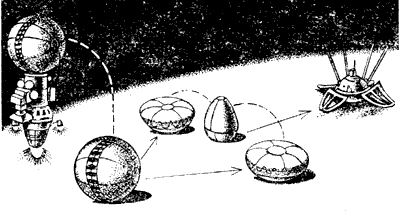
Рис. 6. Схема мягкой посадки станции «Луна-9»
Оригинальное решение для осуществления мягкой посадки на Луну предложил С. П. Королев. Вначале полет лунной станции необходимо было затормозить с помощью двигательной установки до скорости нескольких, метров в секунду, а затем автоматическая лунная станция могла сбрасываться с двигательной установки, а на Луне оказывался спускаемый аппарат, упакованный в надутые сжатым газом мягкие и эластичные баллоны (рис. 6). При незначительной массе (около 100 кг) и сравнительно большой опорной поверхности баллонов (порядка 1,5 м2) удельное давление на грунт оказывается незначительным. Система посадки была разработана таким образом, что при любом грунте (будь то твердая скальная поверхность или рыхлый дисперсный грунт) обеспечивалось надежное прилунение станции.