Применение электродвигателей-маховиков для систематического накопления «паразитных» кинетических моментов вращения является весьма экономичным, если после достижения двигателем-маховиком своих предельных оборотов единовременно сразу затормозить ротор с помощью реактивных двигателей и тем самым получить свободу для нового накопления внешнего «паразитного» кинетического момента. Этот процесс ликвидации «насыщения», т. е. уменьшение скорости вращения, обеспечивается приложением к корпусу внешнего момента от газореактивных двигателей с одновременным включением электрического двигателя на режим торможения противотоком.
В этом случае двигатель-маховик сбрасывает свой кинетический момент и, стало быть, снова становится способным для накопления случайных внешних кинетических моментов, возникающих на космическом аппарате от внешних сил.
Автоматическая система управления тремя двигателями-маховиками конструируется таким образом, чтобы уменьшить общий кинетический момент ориентированного космического аппарата, для чего создается схема силового управления по трем строительным осям — симметрично для трех электродвигателей-маховиков, связанных с блоками управления.
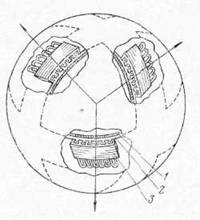
В системе ориентации космического аппарата в отдельных случаях целесообразно использовать электромеханический наполнительный орган не в виде трех отдельных электродвигателей-маховиков, а в виде электрического двигателя с шаровым ротором, применяемым, как было сказано раньше, в морском судостроении. В этом случае употребляется статор типа дугового асинхронного электродвигателя (рис. 13). Электромагнитные моменты, создаваемые секторными статорными обмотками, могут действовать по любой из трех осей (или одновременно по двум осям) в соответствии с сигналами, поступающими от блока автоматики в системе ориентации и стабилизации.
Рис. 13. Схема шарового электродвнгателя-маховика:
1 — сферический ротор; 2 — зазор; 3 — дуговой статор, применяемый для шаровых мельниц
В том случае, если кинетические моменты электродвигателей-маховиков недостаточны для обеспечения поворотов космического аппарата в целом, применяются быстроходные силовые гироскопы в форме трех гироскопических устройств (см. рис. 12). Для подобных устройств рекомендуются каскадно-связанные гироскопические устройства.
Силовой космический моментный магнитодвигатель. Из рассмотрения различных типов исполнительных органов ориентации, стабилизации и программного поворота следует, что газореактивные двигатели вместе с двигателями-маховиками способны ликвидировать внешние «паразитные» моменты, воздействующие на космический летательный аппарат. Для этой же цели применяется так называемый космический моментный магнитодвигатель, использующий естественное магнитное поле Земли. В этом случае внутри космического аппарата устанавливаются электрические катушки (заменяющие работу газореактивных двигателей), токи в которых создают магнитные поля, необходимые для получения нужных моментов вращения.
Рис. 14. Моментный магнитодвигатель системы разгрузки:
1 — магнитометр; 2 — моментный магнитодвигатель; 3 — блоки усиления и управления
Принцип действия моментного магнитодвигателя (рис. 14) заключается в следующем. Космический аппарат при своем движении в околоземном пространстве пересекает двухполюсное магнитное поле Земли. Установленные в космическом летательном аппарате три силовые электромагнитные катушки со стальными сердечниками, взаимодействуя с магнитным полем Земли, могут создавать внешние моменты, воздействующие на корпус аппарата. При этом необходимо измерить магнитное поле Земли в каждом положении центра масс космического летательного аппарата во время орбитального полета и в зависимости от направления магнитного поля регулировать величину и направление токов в электромагнитных катушках (для создания необходимого внешнего момента вращения).
В качестве чувствительного элемента, измеряющего величину и знак магнитного поля Земли вдоль соответствующих осей, используются специальные датчики. Они представляют собой два параллельно расположенных пермаллоевых сердечника с распределенными по их длине первичными и вторичными обмотками (см. рис. 14). Первичные обмотки соединены последовательно-встречно и образуют цепь возбуждения. Поверх обмоток возбуждения размещена общая измерительная обмотка.
Принцип действия датчика основан на использовании свойств измерительной катушки, выполненной из магнито-мягкого материала. При наличии внешнего магнитного поля изменение магнитной проницаемости сердечников приводит к изменению магнитного поля в измерительной катушке и появлению в ней ЭДС индукции, которая растет пропорционально напряженности измеряемого магнитного поля. Сигнал с магниточувствительной катушки поступает в соответствующие электронные блоки для формирования соответствующих команд на включение тока в силовых электромагнитах. Иногда применяется вместо трех два магниточувствительных датчика и в соответствии с этим имеется два канала силового управления.
Электромагниты создают «силовые» магнитные поля, необходимые для получения механических моментов, обеспечивающих поворот и соответствующее вращение космического аппарата, а также процесс ориентации.
Таким образом, применение электромагнитной системы исключает расход газа в режиме стабилизации и ориентации. Этот принцип управления не только обеспечивает «успокоение» космического летательного аппарата, но и поиск ориентиров и последующую его стабилизацию. Однако следует отметить, что система «электромагнитной разрядки» значительно ухудшает свои показатели при увеличении радиуса орбиты в связи с уменьшением напряженности магнитного поля Земли.
Электрореактивные (ионные) двигатели малой тяги. Для создания внешних управляющих моментов, а также для коррекции орбиты при построении систем ориентации космического летательного аппарата можно применять электрореактивные двигатели. Принцип действия их основан на ускорении рабочего тела, например газа, при помощи электроэнергии, создаваемой специальным источником. Полученная скорость рабочего тела на выходе такого двигателя создает динамический импульс (произведение механической силы, действующей на корпус аппарата, на время, в течение которого газ под воздействием электромагнитного поля приобретает заданную скорость).
В отличие от тепловых (химических) реактивных электрореактивные двигатели, как указывал еще К. Э. Циолковский, имеют относительно высокую динамическую импульсную характеристику. Она определяется отношением величины тяги двигателя [кг] к секундному расходу массы [кг/с]. Если тепловые реактивные двигатели, использующие окислители и горючее, дают удельный импульс в несколько сотен секунд, то электрореактивные двигатели, в которых газ разгоняется с помощью электромагнитного поля, могут давать величину импульса в несколько тысяч секунд.
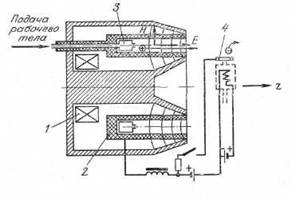
Рис. 15. Принципиальная схема электрореактивного двигателя (Н и Е — направления векторов соответственно магнитного и электрического полей; z — направление, противоположное действию силы)
По режиму работы электрореактивные двигатели можно разделить на стационарные и импульсные, а по механическому характеру создания тяги — на электротермические и электромагнитные. При электромагнитном способе ускорения возможны схемы как с независимым магнитным потоком, воздействующим на плазму, так и с собственным магнитным полем. Рабочее тело электрореактивных двигателей при этом может быть твердым, жидким или газообразным, хорошо пропускающим электрический ток. Высокоэффективны реактивные двигатели с комбинированными полями, в которых напряженности электрического и магнитного полей в простейшем случае действуют перпендикулярно друг другу («скрещенные поля»).