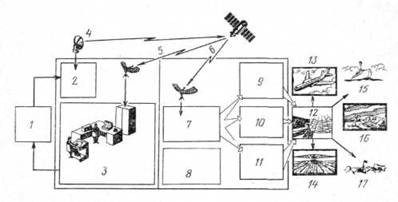
Рис. 3. Функциональная схема космической метеорологической системы:
1 — пункт управления; 2 — наземная аппаратура командной радиолинии; 3 — пункт автоматической обработки телеметрической информации; 4 — командная радиолиния; 5 — телеметрическая информация; 6 — радиолиния метеорологической информации; 7— аппаратура преобразования метеорологической информации; 8 — пункты приема метеорологической информации; 9 — обработка телевизионной информации; 10 — обработка актинометрической информации; 11 — обработка инфракрасной информации; 12 — Гидрометеоцентр СССР. Выпуск прогнозов: 13 — для авиации; 14 — для сельского хозяйства; 15 — для кораблей морского флота; 16 — для населения об опасных явлениях погоды; 17 — о состоянии ледяного покрова
Из этого примера следует, что функции систем управления любого космического аппарата сводятся к тому, чтобы, во-первых, обеспечить начальное «успокоение» аппарата после его отделения от ракеты-носителя (т. е. чтобы свести к минимуму угловую скорость вращения, полученную им в момент отделения), и, во-вторых, обеспечить соответствующие программные повороты вокруг трех взаимно ортогональных строительных осей, жестко связанных с центром масс космического летательного аппарата. Система управления должна, кроме того, иметь возможность осуществлять поиск специальных ориентиров (Земли, Луны, Солнца, планет Солнечной системы, звезд) и обеспечивать стабилизацию космического аппарата относительно этих ориентиров с точностью, необходимой для работы бортовых аппаратов и научных приборов. В функцию системы управления также входит стабилизация космического летательного аппарата по заданному курсу и автоматическое управление реактивными двигателями для изменения траектории центра масс и маневрирования кораблем.
ЭЛЕКТРОМЕХАНИЧЕСКАЯ СТРУКТУРА КОСМИЧЕСКИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Большинство искусственных спутников Земли, а также космические аппараты, предназначенные для полетов на Луну, Марс, Венеру и другие планеты, являются длительно действующими летательными аппаратами. К ним относятся, в частности, спутники связи, спутники исследования природных ресурсов Земли, метеорологические, такие, как советские «Молния», «Радуга», «Метеор», американские «Нимбус», НОАА. Все они имеют электромеханические системы для выполнения тех или иных физических операций при орбитальном полете. Общие принципы этих устройств носят типовой характер, отличаясь лишь различными конструктивными модификациями.
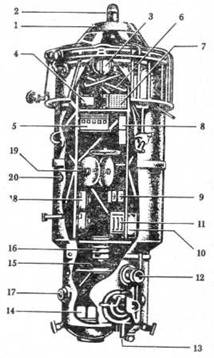
Рис. 4. Электромеханические устройства на типовом космическом аппарате:
1 — электропривод ориентации солнечной батареи; 2 — оптико-электромеханический астродатчик; 3 — электропневмоклапаны газореактивной системы; 4 — электромеханические коммутаторы телесигнализации; 5 — электромеханические лентопротяжные устройства памяти; 6 — электромагниты для сброса кинетических моментов; 7 — релейно-контакторная аппаратура; 8 — электромашинный преобразователь; 9— датчики угловых скоростей; 10 — устройство записи воспроизведения; 11 — шаговые электродвигатели; 12 — сканирующий оптико-электромеханический блок инфракрасной аппаратуры; 13 — электромеханический построитель местной вертикали; 14 — сканирующая телевизионная аппаратура; 15 — электропривод системы терморегулирования; 16 — электродвигатели-вентиляторы; 17 — электромеханическая спектрометрическая аппаратура; 18 — гироскопический датчик курса; 19 — электродвигатели-маховики; 20 — электрореактивный двигатель системы коррекции
На рис. 4 представлен комплекс электромеханических устройств на таком типовом космическом аппарате, которые обеспечивают выполнение различных функциональных программ в условиях космического полета. Для электроэнергетического снабжения комплекс имеет солнечную батарею, буферную химическую батарею, автоматы, обеспечивающие подзарядку и разрядку аккумуляторов, или батарею с изотопным источником энергии. Для ориентации и стабилизации в комплексе применяются оптико-механические астродатчики, электромеханические построители местной вертикали, электромеханические датчики угловых скоростей, силовые управляющие исполнительные органы (газореактивные системы или электрореактивные двигатели с автоматикой управления, электродвигатели-маховики, электромагниты для внешнего управления угловыми поворотами космических летательных аппаратов. Кроме того, в комплекс входят различного рода электрические двигатели, в частности сканирующие (в научной аппаратуре), и специальные электродвигатели в аппаратуре терморегулирования, а также автомат (или ЭВМ) управления объектом в целом (по заданной программе эксплуатации) со всеми необходимыми внешними устройствами, обеспечивающими выполнение программы полета. Таким образом, электромеханические системы, будучи достаточно обширными, определяют структуру и принципы динамики движения космического аппарата в зависимости от его назначения.
Принцип действия (см. рис. 4) электромеханических систем типового космического аппарата заключается в следующем. После отделения от последней ступени ракеты-носителя аппарат получает некоторую угловую скорость вращения. Датчики угловых скоростей по строительным осям 9 регистрируют эти скорости и с помощью автоматики и электроклапанов газореактивной системы 3 ориентирует и стабилизируют объект. Последующая его ориентация и стабилизация обеспечиваются электромеханическим построителем местной вертикали 13 и гироскопическим датчиком курса 18, которые вырабатывают сигналы, поступающие на автоматическую систему, газореактивные двигатели и электромагниты для сброса кинетических моментов 6 или электродвигатели-маховики 19. Оптико-электромеханический астродатчик 2 затем корректирует ориентацию космического аппарата в пространстве с помощью электрореактивных двигателей системы коррекции 20. При этом постоянно ориентированные солнечные батареи 1 с соответствующей аккумуляторной батареей обеспечивают электроэнергией космический аппарат в целом, в том числе инфракрасную аппаратуру 12, электропривод системы терморегулирования 15 и электродвигатели-вентиляторы 16.
Развитие многочисленных функциональных областей применения электромеханических систем для космических летательных аппаратов с первых дней освоения космического пространства сопровождалось интенсивными научно-исследовательскими и опытно-конструкторскими работами как в условиях наземных испытаний отдельных электрических машин, приборов и различных систем для космических аппаратов, так и особенно их отработки в космических условиях орбитального полета. При этом элементы электромеханических систем во время орбитального полета снабжались соответствующими датчиками, характеризующими их работоспособность на орбите (показатели датчиков регистрировались с помощью телеметрии).
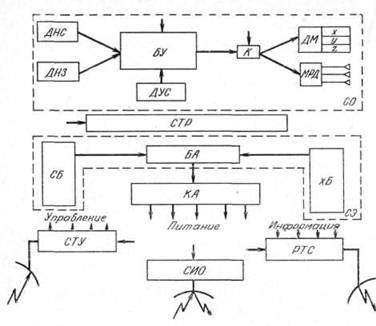
На рис. 5 представлена структурно-функциональная схема спутников «Космос-14» и «Космос-23», а на рис. 6 — внешний вид спутников с указанием пространственного положения отдельных приборов и аппаратов. «Космос-14» имел очень широкую возможность ориентации и стабилизации в пространстве. На нем была установлена трехосная система ориентации и стабилизации, которая позволяла ориентировать данный космический летательный аппарат и с помощью теплового пеленгатора (построителя местной вертикали) и одновременно на Солнце при применении соответствующих датчиков. В полете был исследован режим «закрутки» всего спутника вместе с раскрытыми солнечными батареями вокруг оси, ориентированной на Солнце с помощью электродвигателей-маховиков. При этом солнечные батареи были жестко закреплены относительно корпуса спутника.
Рис. 5. Структурно-функциональная схема спутников «Космос-14» и «Космос-23»:
СО — система ориентации; ДНС — датчик направления на Солнце; ДНЗ — датчик направления на Землю; ДУС — датчик угловой скорости; БУ — блок управления; К — переключатель; ДМ — двигатели-маховики; МРД — микрореактивные двигатели; СЭ — система энергопитания; СБ — солнечные батареи; БА — блок автоматики; хБ — химическая батарея; СТУ — система телеуправления; СИО — система измерения орбиты; РТС — радиотелеметрическая система; СТР — система терморегулирования; КА — коммутационный автомат