ЗА ЛУННЫМ КАМНЕМ. ЛУНОХОДЫ
К 70-м годам в Советском Союзе создается новое поколение «лунных» космических аппаратов, позволявших решать широкий спектр научных задач. В основу конструктивного построения этих автоматических станций было положено их разделение на ступени, первая из которой (посадочная) представляла собой унифицированный автономный ракетный блок, обеспечивающий выполнение коррекции траектории при перелете Земля-Луна, выход на селеноцентрические орбиты с широким диапазоном орбитальных параметров, маневрирование в окололунном пространстве и, наконец, осуществление посадки в различных районах лунной поверхности. В качестве полезного груза ступень могла нести различное оборудование.
Создание станций нового поколения стало решающим фактором при осуществлении выдающихся экспериментов в области изучения Луны с помощью космических аппаратов — забор лунного грунта с его доставкой на Землю и работа передвижных лабораторий на лунной поверхности. Однако прежде чем перейти непосредственно к этим экспериментам, рассмотрим более подробно элементы конструкции новых АС и их оборудование.
Посадочная ступень включала в себя систему топливных баков, жидкостные ракетные двигатели с регулируемой тягой, приборные отсеки и амортизирующие опоры. На посадочной ступени монтировались микродвигатели и датчики системы ориентации, а также емкости с рабочим телом двигателя и антенны радиокомплекса.
Основным силовым элементом посадочной ступени был блок топливных баков, состоявший из четырех сферических емкостей, соединенных в единую конструкцию. На них крепилась двигательная установка и все необходимое оборудование. Снизу к бакам пристыковывались амортизирующие опоры.
Посадочная ступень имела два сбрасываемых отсека, каждый из которых состоял из двух топливных баков и расположенного между ними герметичного контейнера с аппаратурой системы астроориентации и автоматики радиокомплекса. В специальных отсеках (они отбрасывались перед заключительным этапом торможения при посадке) размещалось оборудование и топливо, необходимое для перелета к Луне.
Двигательная установка новых АС состояла из основного однокамерного двигателя, двухкамерного двигателя малой тяги, управляющих газовых сопел и системы подачи топлива в камеру сгорания.
Основной двигатель АС предназначался для проведения коррекции траектории и для торможения. Двигатели малой тяги работали непосредственно перед посадкой. Основной двигатель имел насосную подачу топлива в камеру сгорания и допускал возможность многоразового включения. Работал он в трех режимах — в диапазоне тяги 750-1930 кг. Двухкамерный двигатель малой тяги имел вытеснительную подачу топлива, мог включаться только один раз и работал в трех режимах — в диапазоне тяги от 210 до 350 кг.
Каждая из опор посадочного устройства, предназначенных для гашения кинетической энергии станции в момент касания лунной поверхности и для сохранения устойчивого положения после посадки, состояла из V-образного подкоса, опорного диска и амортизатора.
Во время старта ракеты-носителя с АС опоры были подняты и находились в сложенном состояния. После отделения станции от последней ступени ракеты- носителя опоры под действием пружины открывались в рабочее положение.
Полет АС к Луне теперь осуществлялся в несколько этапов. После отделения от последней ступени и выхода станции на трассу перелета координационно-вычислительный центр, на основе траекторных измерений определяя отличие действительных траекторных параметров от расчетных, принимал решение о необходимой коррекции, вычисляя время включения двигателя и направление корректирующего импульса. Все эти данные в виде команд передавались на борт АС и закладывались в блок памяти системы управления.
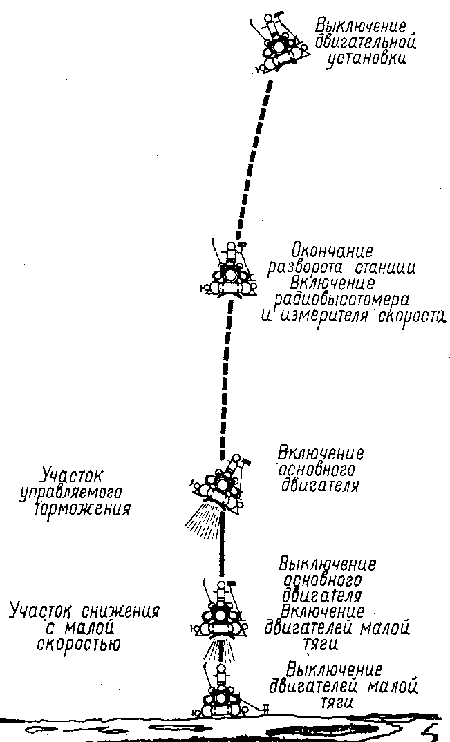
Рис. 6. Схема спуска АС «Луна-16» на поверхность Луны
Перед включением корректирующего двигателя должен был быть произведен разворот станции и соответствующим образом измениться ее ориентация в пространстве. При этом сначала АС приводились в так называемое «базовое положение», когда чувствительные элементы системы ориентации «видят» Солнце и Землю. Затем с помощью разворотов вокруг двух осей АС устанавливалась в исходное положение. После того как в расчетное время по сигналу программно- временного устройства включался двигатель, гироскопические приборы, «запомнившие» нужное положение станции, с помощью управляющих органов «парировали» все возмущения, возникавшие при работе двигательной установки.
Как только скорость станции изменялась на необходимую величину, автоматика подавала команду на выключение двигателя. По аналогичной схеме происходил вывод станции на окололунную орбиту или осуществлялась коррекция орбитального движения.
После маневрирования в окололунном пространстве (так называемого процесса формирования посадочной орбиты) производилось уточнение параметров движения, и на борт АС выдавались кодограммы, определяющие последовательность операций при посадке. При приведении АС в исходное для торможения положение отбрасывались навесные отсеки, включалась двигательная установка и начинался спуск на лунную поверхность (рис. 6). Затем, когда станция получала необходимый тормозной импульс, двигатель выключался и АС совершала стабилизированный баллистический спуск, причем вертикальная и горизонтальная составляющие скорости при этом непрерывно измерялись с помощью доплеровской измерительной системы и высотомера.
При определенных значениях вертикальной составляющей скорости движения и высоты над поверхностью основной двигатель включался вновь, а после окончания его работы запускался двухкамерный двигатель малой тяги, который уже окончательно гасил скорость АС (он выключался по команде, подаваемой от бортового гамма-высотомера).
Для иллюстрации работы основного двигателя приведем значения высот над поверхностью в характерных точках участка спуска АС «Луна-17». Первое включение тормозного двигателя произошло на высоте 22 км над лунной поверхностью при продольной скорости АС 1692 м/с. На высоте 2,3 км двигатель выключился. Его второе включение произошло на высоте около 700 м, выключение — на высоте 20 м. В момент касания поверхности станция имела вертикальную скорость снижения около 3,5 м/с, боковая составляющая равнялась примерно 0,5 м/с.
К автоматическим станциям, выполненным на базе унифицированной посадочной ступени, относятся АС «Луна-16, -20, -24», доставившие на Землю грунт из различных районов Луны, а также «Луна-17, — 21», на которых были установлены передвижные самоходные научные лаборатории «Луноход-1, -2» (см. Приложение).
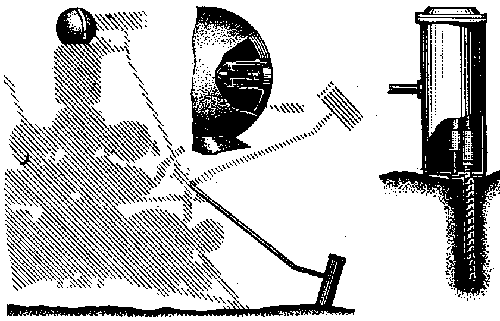
Рис. 7. Схема грунтозаборного устройства и возвращаемого аппарата станций «Луна-16»
Операции по забору лунного грунта совершались с помощью грунтозаборных механизмов. Грунтозаборное устройство, используемое, например, при полетах АС «Луна-16, -20» (рис. 7), состояло из штанги с укрепленным на ней буровым станком и электромеханических приводов, перемещающих штангу в вертикальной и горизонтальной плоскостях. Рабочим органом бурового станка был виброударный бур с резцами на конце (внутри он был полым).
Буровые механизмы обеспечивали работу с горными породами, имеющими широкий диапазон физико-механических свойств — от пылевато-песчаных до скальных. Максимальная глубина бурения составляла 35 см. Это оборудование приводилось в движение электродвигателями, скорость углубления бура в грунт и мощность, потребляемая электродвигателями, контролировались с Земли телеметрически.
Бурение при работе АС «Луна-16» продолжалось около 6 мин и проводилось на полную глубину. В конце рабочего хода электродвигатели бурового станка автоматически отключались. Масса добытого образца составила около 100 г.