Процесс бурения грунта в материковом районе АС «Луна-20» был более сложным. Несколько раз происходила автоматическая остановка бура из-за того, что ток в электродвигателях превышал допустимую величину. Проходка скважины проводилась на глубину около 300 см (в тексте опечатка, дано «м»). Масса добытого образца составляла 50 г.
После выполнения всех необходимых операций станок отводился от грунта, поднимался и разворачивался на 180 градусов, а затем бур с находящимся внутри него грунтом помешался в герметически закрываемую капсулу возвращаемого аппарата.
Автоматическая станция «Луна-24» была оборудована приспособлением для глубинного бурения. Это устройство включало в себя буровую головку, перемещающуюся по специальным направляющим, закрепленным на посадочной ступени, и ракете «Луна-Земля», буровую штангу с коронкой, механизм подачи буровой головки, эластичный грунтонос для размещения добытого грунта, механизмы для намотки грунтоноса с грунтом на специальный барабан и для помещения его в возвращаемый аппарат.
Бурение производилось вращательным или ударно- вращательным движениями инструмента. Режим работы выбирался автоматически или по командам с Земли в зависимости от условий проходки, прочности и вязкости грунта. Установка позволила получить керн грунта диаметром 8 мм, максимальный рабочий ход буровой головки составлял 2,6 м. Масса образца, доставленного на Землю, — 170 г (фактическая длина добытого керна равнялась 1600 мм).
Доставка лунного грунта на Землю выполнялась с помощью взлетной ступени АС, после старта с Луны так называемой «Лунной ракеты», которая состояла из двигательной установки (имеющей шаровые баллоны с топливом и ракетный двигатель с насосной подачей компонентов топлива в камеру сгорания), приборного отсека с аппаратурой управления и возвращаемого аппарата, в котором лунный грунт совершал перелет Луна-Земля, спуск в атмосфере и приземление.
Возвращаемый аппарат имел шаровую форму и устанавливался вверху приборного отсека. Его оболочка была изготовлена из металла со специальным теплозащитным покрытием, предохраняющим от воздействия высоких температур на участке баллистического спуска в плотных слоях атмосферы. В возвращаемом аппарате размещались цилиндрический герметически закрываемый контейнер для лунного грунта, парашютная система, элементы автоматики, управляющие вводом в действие парашютной системы, аккумуляторные батареи, пеленгационные передатчики, радиоантенны и эластичные, наполненные газом, баллоны для обеспечения необходимого положения аппарата на поверхности Земли.
Старт «Лунной ракеты» к Земле происходил по направлению лунной местной вертикали. Это направление «запоминалось» системой управления при посадке на Луну. В случае если продольная ось взлетной ступени могла быть отклонена от вертикали при взлете, система управления выдавала необходимые команды, благодаря которым ракета выходила на нужную траекторию.
При достижении необходимой скорости разгона (например, у АС «Луна-16» она равнялась 2708 м/с) двигатель отключался, и «Лунная ракета» далее шла по баллистической траектории. В процессе перелета бортовой радиокомплекс обеспечивал связь с Землей и проведение траекторных измерений для уточнения места посадки возвращаемого аппарата. При подлете к Земле на борт АС передавалась команда на подрыв пиропатронов металлических лент крепления возвращаемого аппарата к приборному отсеку, и после того как благодаря движению в атмосфере космический аппарат гасил скорость до определенной величины, вводилась в действие парашютная система.
Самоходные аппараты, управляемые с Земли, «Луноход-1, -2», предназначенные для проведения комплексных научных исследований при длительной работе на лунной поверхности, доставлялись с помощью АС «Луна-17, -21».
«Луноходы» размещались на посадочной ступени и крепились днищами к четырем вертикальным стойкам через специальные пироузлы. На посадочной ступени устанавливались также трапы для схода передвижной лаборатории на лунную поверхность. Во время полета АС трапы находились в сложенном состоянии, а после посадки раскрывались под действием специальных пружин.
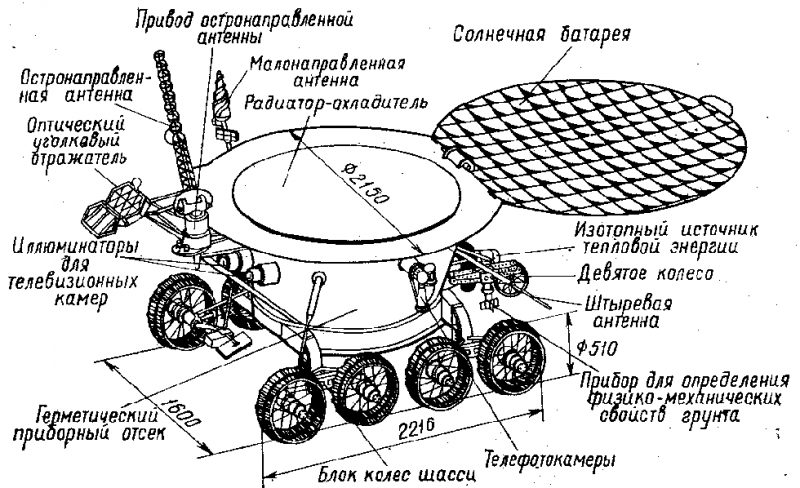
Аппараты «Луноход» (общая масса около 800 кг) (рис. 8) состояли из двух основных частей: приборного отсека и самоходного шасси. Приборный, отсек предназначался для размещения научной аппаратуры и устройств, которые необходимо было предохранять от воздействия условий открытого космоса. Верхняя часть корпуса приборного отсека использовалась как радиатор в системе терморегулирования и закрывалась крышкой. На время лунной ночи крышка закрывалась и предохраняла отсек от излишней потери тепла, лунным же днем была открыта, способствуя сбросу избыточного тепла в пространство. На внутренней поверхности крышки размещались элементы солнечной батареи. Крышка могла устанавливаться под различными углами и обеспечивать оптимальное освещение солнечной батареи в процессе работы самоходного аппарата.
Необходимый тепловой режим оборудования поддерживался как пассивными, так и активными методами. В качестве теплозащиты использовалась экранно-вакуумная изоляция на наружной поверхности приборного отсека (пассивный метод). Активная теплозащита осуществлялась регулированием температуры газа, циркулирующего внутри отсека. При помощи вентилятора и специальной заслонки газ направлялся в горячий или холодный контуры системы терморегулирования. Использовался и локальный обдув некоторых приборов с помощью отдельных каналов подвода газа.
Рис. 8. Схема самоходного аппарата «Луноход-1»
Горячий контур включал в себя блок обогрева, размещенный сзади «Лунохода» (вне приборного отсека). Тепло в блоке вырабатывалось в процессе распада радиоактивного изотопа.
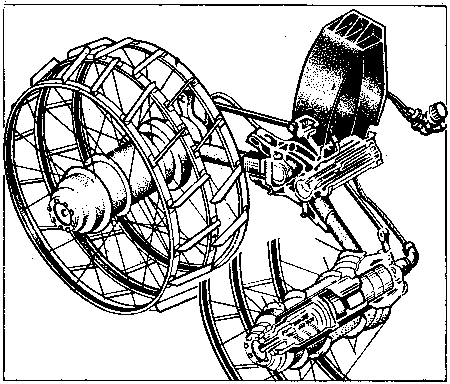
Приборный отсек устанавливался на восьмиколесном шасси, обладавшем высокой проходимостью при относительно малой массе и энергопотреблении. Колеса «Лунохода» (рис. 9) имели независимую подвеску: в ступицу каждого колеса был вмонтирован электромеханический привод (поэтому каждое из них являлось ведущим). Упругими элементами здесь были торсионы; крепление колес обеспечивало преодоление уступов высотой 400 мм без удара об опоры.
Привод колеса состоял из электродвигателя постоянного тока, щетки которого были изготовлены из специального материала, предназначенного для работы в вакууме, а также редуктора и механического тормоза с электромагнитным управлением. Выходной вал трансмиссии имел локальное ослабление сечения, чтобы он смог бы разрушиться подрывом пироустройства по команде с Земли (в случае его заклинивания). При этом данное колесо становилось ведомым и не мешало движению: конструкция шасси допускала одновременную разблокировку пяти из восьми колес без потери подвижности «Лунохода».
Рис. 9. Схема устройства колеса «Лунохода-1»
Управление самоходным аппаратом велось по командам с Земли экипажем, состоящим из командира, водителя, штурмана, бортинженера и оператора остронаправленной антенны. В качестве информации, необходимой для управления, использовались телевизионное изображение местности перед «Луноходом», телеметрические данные бортовых гироскопов и датчиков пройденного пути, сведения о состоянии бортовых систем, крене и дифференте самоходного аппарата, токе двигателей колес и т. д.
Командир экипажа осуществлял общее руководство работой и принимал окончательное решение на основании информации, поступающей от штурмана, бортинженера и водителя. Водитель непосредственно управлял «Луноходом», а штурман выполнял навигационные расчеты, выдавал рекомендации о направлении движения, отвечал за контроль пройденного пути. Бортинженер контролировал состояние всех систем аппарата, а оператор остронаправленной антенны следил за ее правильной ориентацией и обеспечением оптимальных условий связи.