Лит.: Тамм И. Е., Теория магнитного термоядерного реактора, ч. 1, в сборнике: Физика плазмы и проблема управляемых термоядерных реакций, т. 1, М., 1958; Сахаров А. Д., Теория магнитного термоядерного реактора, ч. 2, там же; Арцимович Л. А., Управляемые термоядерные реакции, М., 1963; Капица П. Л., Свободный плазменный шнур в высокочастотном поле при высоком давлении, «Журнал экспериментальной и теоретической физики», 1969, т. 57, в. 6(12); его же, Термоядерный реактор со свободно парящим в высокочастотном поле плазменным шнуром, там же, 1970, т. 58, в. 2; Роуз Д., Управляемый термоядерный синтез. (Результаты и общие перспективы), «Успехи физических наук», 1972, т. 107, в. 1, с. 99; Лукьянов С. Ю., Горячая плазма и управляемый ядерный синтез, М., 1975; Лазеры и термоядерная проблема, под ред. Б. Б. Кадомцева, М., 1974; Ribe F. L., Fusion reactor systems, «Reviews of Modern Physics», 1975, v. 47, №1; Furth H. P., Tokamak Research, «Nuclear Fusion», 1975, v. 15, № 3; Ashby D. Е., Laser fusion, «Journal of the British Nuclear Energy Society», 1975, № 4.
С. Ю. Лукьянов.
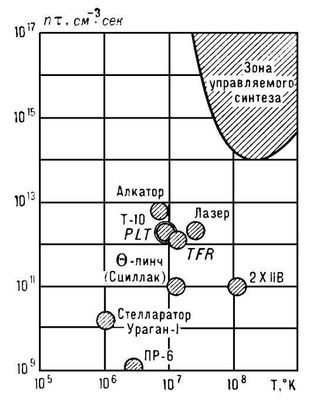
Рис. 3. Параметры, достигнутые на различных установках для изучения проблемы управляемого термоядерного синтеза к середине 1976. Т-10 — установка токамак Института атомной энергии им. И. В. Курчатова, СССР; PLT — установка токамак Принстонской лаборатории, США; Алкатор — установка токамак Массачусетского технологического института, США; TFR — установка токамак в Фонтене-о-Роз, Франция; ПР-6 — открытая ловушка Института атомной энергии им. И. В. Курчатова, СССР; 2ХIIB — открытая ловушка Ливерморской лаборатории, США; θ-пинч (Сциллак) — установка Лос-Аламосской лаборатории, США; Стеллатор «Ураган-1» — установка Украинского физико-технического института, СССР; Лазер-импульсные системы с лазерным нагревом, СССР, США.
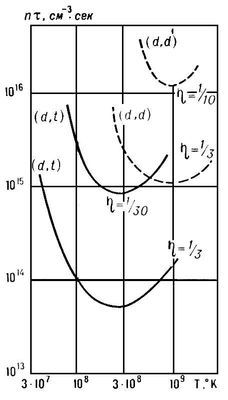
Рис. 2. к ст. Управляемый термоядерный синтез.
Рис. 1. к ст. Управляемый термоядерный синтез.
Управляющая машина
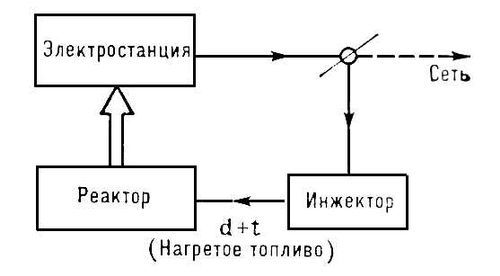
Управля'ющая маши'на , управляющая вычислительная машина (УВМ), вычислительная машина, включенная в контур управления техническими объектами (процессами, машинами, системами). УВМ принимают и обрабатывают информацию, поступающую в процессе управления, и выдают управляющую информацию либо в виде текста, таблицы, графика, отпечатанных на бумаге или отображаемых на экране дисплея, либо в виде сигналов (воздействий), подаваемых на исполнительные органы объекта управления (см. рис. ). Главная цель применения УВМ – обеспечение оптимальной работы объекта управления. Управление с помощью УВМ строится на основе математического описания поведения объектов (см. Алгоритмизация процессов , Математическая модель ). Отличительная особенность УВМ – наличие в них наряду с основными устройствами, входящими в состав всех ЭВМ (процессором , памятью и др.), комплекса устройств связи с объектом. К этому комплексу относятся устройства, осуществляющие ввод в процессор данных (получаемых от датчиков величин, характеризующих состояние управляемого объекта), устройства, обеспечивающие выдачу управляющих воздействий на исполнительные органы, а также различные преобразователи сигналов, устройства отображения информации.
Различают УВМ универсальные (общего назначения) и специализированные. К специализированным относятся УВМ, ориентированные на решение задач в системах, управляющих заранее определённым небольшим набором объектов (процессов). К универсальным относят УВМ, которые по своим техническим параметрам и возможностям могут быть использованы практически в любой системе управления. По способу представления информации УВМ делят на цифровые (см. Цифровая вычислительная машина ), аналоговые (см. Аналоговая вычислительная машина ) и гибридные – цифро-аналоговые. Цифровые УВМ превосходят аналоговые по точности управления, но уступают им в быстродействии. В гибридных УВМ цифровые и аналоговые вычислительные устройства работают совместно, что позволяет в максимально степени использовать их достоинства.
УВМ является центральным звеном в системах автоматического управления (САУ). Она осуществляет обработку информации о текущих значениях физических величин, характеризующих объект, и об их изменении, а также вырабатывает управляющие сигналы, обеспечивающие заданные режимы его работы. В автоматизированных системах управления (АСУ) технологическими процессами УВМ обычно работает в режиме советчика, выдавая оператору сведения о состоянии объекта управления и рекомендации по оптимизации процесса управления, или (реже) в режиме непосредственного управления. По назначению и области использования УВМ подразделяются на промышленные, аэрокосмические, транспортные и др.
Появление УВМ связано с разработкой бортовых вычислительный машин для военной авиации в начале 50-х гг. Так, например, одна из первых бортовых УВМ – «Диджитак» (США, 1952) предназначалась для автоматического управления полётом и посадкой самолёта, для решения задач навигации и бомбометания. В ней использовалось около 260 субминиатюрных электронных ламп и 1300 полупроводниковых диодов. УВМ занимала объём 150 дм3 при массе 150 кг. В середине 50-х гг. были разработаны первые бортовые УВМ на транзисторах, а в начале 60-х гг. – первые бортовые УВМ на интегральных микросхемах, в том числе несколько моделей со сравнительно высокими вычислительными возможностями. Примером такой УВМ может служить «УНИВАК-1824» (США, 1963), состоящая из арифметико-логического устройства, запоминающего устройства, блока ввода-вывода данных и блока питания; объём, занимаемый УВМ, 4,1 дм3, масса 7 кг, потребляемая мощность 53 вт (при этом не требовалась система охлаждения или вентиляции); эта УВМ собрана на 1243 интегральных микросхемах. В начале 60-х гг. УВМ применяли в системах управления непрерывными технологическими процессами (пример – УВМ RW-300, США, включенная в контур управления технологическими процессами производства аммиака). В такой системе управления воздействия, вырабатываемые УВМ, преобразовывались из цифровой формы в аналоговую и в виде электрических сигналов поступали на регуляторы исполнительных механизмов. Непосредственное цифровое управление непрерывным технологическим процессом впервые было применено в 1962 в СССР (в системе управления «Автооператор» на Лисичанском химкомбинате) и в Великобритании (в системе управления «Аргус-221» на содовом заводе в г. Флитвуд). Для управления непрерывными технологическими процессами в СССР в 60-х гг. были разработаны вычислительные машины «Днепр», «Днепр-2», ВНИИЭМ-1, ВНИИЭМ-3, УМ-1-НХ и др.
В середине 60-х гг. появилась тенденция к переходу от выпуска единичных моделей УВМ к выпуску управляющих вычислительных комплексов (УВК), которые строятся по агрегатному принципу. УВК представляет собой набор вычислительных средств, средств связи с объектом и оператором, внутренней и внешней связи. Пример УВК – комплекс М-6000, входящий в агрегатированную систему средств вычислительной техники (АСВТ), разработанную в СССР (серийный выпуск с 1969). Конструктивно ЛСВТ представляет собой набор модулей, из которых компонуют различные по структуре и назначению УВК. В основном это комплексы для сбора и первичной обработки информации при управлении различными технологич. процессами, научными экспериментами и т.п. УВК М-6000 состоит из универсального цифрового процессора, устройств ввода-вывода данных, агрегатных модулей сбора и выдачи аналоговой и дискретной информации, агрегатных модулей для организации внутренней связи и связи с др. комплексами. На базе АСВТ создаются многоуровневые АСУ промышленным предприятием. На нижнем уровне такой системы используются относительно простые УВМ (например, микропрограммный автомат М-6010 и машина централизованного контроля М-40), выполняющие функции непосредственного управления технологическим процессом. На среднем уровне при помощи УВК (например, УВК М-6000 и М-400) решаются более сложные задачи управления, связанные с оптимизацией группы технологических процессов. Эти УВК, в свою очередь, имеют связь с центральным звеном системы, которое решает задачи управления работой всей системы в целом, в том числе задачи учёта и планирования производства. На этом уровне обычно используются большие УВК (например, М-4030 и М-7000).