В. Г. Шорин.
Управления система с переменной структурой
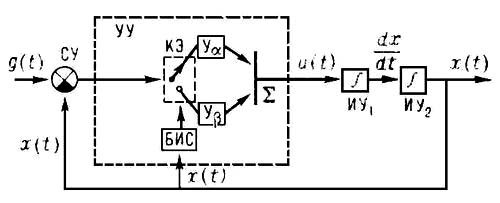
Управле'ния систе'ма с переме'нной структу'рой (СПС), нелинейная система автоматического управления, состоящая из совокупности непрерывных подсистем (называемых структурами) с определённым правилом перехода в процессе функционирования от одной структуры данной совокупности к другой. В СПС устройство управления содержит ключевые элементы, которые разрывают или восстанавливают связи между функциональными элементами системы, изменяя тем самым каналы передачи воздействий и обеспечивая переход от одной структуры системы к другой (рис. 1 ). Такой принцип построения устройства управления существенно расширяет возможности управления вследствие использования полезных свойств каждой из структур и, кроме того, позволяет получить новые свойства, не присущие ни одной из них.
Особенности СПС можно пояснить на примере простейшей системы автоматического управления (САУ), поведение (движение) которой описывается дифференциальным уравнением
, (1)
где х – управляемая величина, u – управляющее воздействие, t – время. Пусть в САУ (1) возможна реализация лишь положительной (u = bx , b = const > 0) и отрицательной (u = – aх, a = const > 0) обратной связи (a и b – коэффициент передачи цепи обратной связи). При положительной обратной связи движение САУ описывается уравнением
: (структура I), а при отрицательной
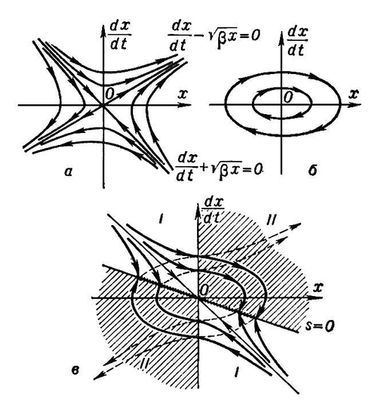
(структура II). Для наглядного представления поведения (движения) САУ строят её фазовые портреты (см.
Фазовой плоскости метод ) для структуры I (
рис. 2 , а) и структуры II (
рис. 2 , б).
Задача состоит в том, что требуется выбрать такое управление и из класса возможных управлений, при котором система обладает асимптотической устойчивостью. Из анализа фазовых портретов системы следует, что ни положительная, ни отрицательная обратная связь порознь не решает поставленной задачи. Поэтому в соответствии с методами СПС реализуют следующее правило изменения структур:
(2)
,
c = const, 0 <
c <
.
Фазовый портрет такой системы изображен на рис. 2 , б; из анализа портрета следует, что изображающая точка из произвольного начального положения попадает на прямую s= 0, проходящую через начало координат, в окрестности которой фазовые траектории направлены навстречу друг другу и, следовательно, изображающая точка не может покинуть эту прямую. Траектория s = 0 не принадлежит ни одной из структур (I или II), поэтому, согласно (2), за счёт переключения управления и в системе происходит смена структур теоретически с бесконечной частотой. Такой режим движения называется скользящим, а за уравнение движения принимается уравнение прямой s = 0:
,
c > 0. (3)
Все решения уравнения (3) стремятся к нулю при t ® ¥, т. е. поставленная задача решена. Существенно, что движение системы в скользящем режиме не зависит от характеристик объекта управления и коэффициент обратной связи, качество переходного процесса определяется только выбором параметра с.
Рассмотренный пример показывает, что посредством сочетания неприемлемых порознь структур и за счёт использования скользящих режимов можно синтезировать СПС, обладающие рядом положительных свойств, в частности апериодической устойчивостью и параметрической инвариантностью . С помощью СПС решается широкий круг задач теории управления, например задачи высококачественного воспроизведения задающего воздействия при инвариантности к параметрическим и внешним возмущениям, многосвязного регулирования, оптимизации и др.
Лит.: Емельянов С. В., Системы автоматического управления с переменной структурой, М., 1967; Системы с переменной структурой и их применение в задачах автоматизации полёта, М., 1968; Теория систем с переменной структурой, М., 1970; Уткин В. И., Скользящие режимы и их применения в системах с переменной структурой, М., 1974.
Б. З. Голембо, С. К. Коровин.
Рис. 1. Функциональная схема системы управления с переменной структурой: УУ — устройство управления; СУ — сравнивающее устройство; КЭ — ключевой элемент; БИС — блок изменения структуры; ∑ — сумматор; Уa — усилитель с коэффициентом передачи a; Уb — усилитель с коэффициентом передачи b; ИУ — интегрирующие устройства; g(t) — задающее воздействие; u(t) — управляющее воздействие; x(t) — управляемая величина.
Рис. 2. Фазовые портреты систем автоматического управления: а — с положительной обратной связью (структура I); б — с отрицательной обратной связью (структура II); в — с переменной структурой; I — область движения системы со структурой I; II — область движения системы со структурой II; 0 — начало координат; x — управляемая величина; t — время.
Управления уровни
Управле'ния у'ровни, относительные градации совокупностей элементов управления сложной системы , сгруппированных и выделенных в соответствии с иерархическим принципом . Элементы управления разных уровней взаимосвязаны и имеют чёткое подчинение. В иерархических системах управления каждое подразделение (подсистема) решает задачи только своего уровня; исходная информация для принятия решения и выработки управляющих воздействий передаётся снизу вверх, а управляющая информация (воздействия) – сверху вниз. Например, в цифровой вычислительной машине (ЦВМ) работу отдельных устройств (запоминающего устройства , печатающего устройства и др.) координирует (в соответствии с заданной программой вычислений) центральное управляющее устройство , одним из элементов которого является пульт управления ЦВМ (высший У. у.). Местные устройства управления (низший У. у.) по командам центрального устройства управления вырабатывают (в соответствии с собственным алгоритмом функционирования) сигналы на выполнение отдельных операций, которые в совокупности представляют собой вычислительный процесс. В автоматизированных системах управления технологическими процессами (АСУТП) автоматические регуляторы , управляющие работой исполнительных механизмов и рабочих машин, и измерительные преобразователи (датчики), осуществляющие контроль за ходом технологического процесса, составляют низший У. у. Контрольно-измерительная информация с датчиков поступает на пульт управления диспетчера или в управляющую ЭВМ (высший уровень), которые оценивают правильность выполнения рабочих операций и вырабатывают команды, поступающие на элементы низшего У. у. (см. Управление в технике). В более сложных системах, например в автоматизированных системах управления отраслью (ОАСУ) и предприятием (АСУП), в единых энергосистемах выделяют 3 и более У. у.
Разделение функции управления по У. у. в сложных системах позволяет ограничить круг задач, решаемых каждым подразделением, упорядочить распределение информации между элементами управления, упростить отчётность и сократить число разновидностей документации, улучшить качество принимаемых решений.