Локомоция
Мышечная система позвоночных состоит из симметрично расположенных вдоль тела сегментов. Правда, посегментное расположение мышц выражено у хордовых слабее, чем у членистоногих и червей, а у высших представителей позвоночных оно сильно нарушено. Различают соматическую мускулатуру, обслуживающую эффекторные органы, и висцеральную — мускулатуру внутренних органов и кожи. Соматическая мускулатура состоит всегда из поперечно-полосатых мышечных волокон.
Конечности позвоночных представлены непарными и парными образованиями. Непарные конечности имеются только у круглоротых и рыб. Это спинной, заднепроходный и хвостовой плавники. Парные конечности, передние и задние, сильно различаются у разных позвоночных соответственно своей функции (плавники, крылья, лапы, ласты, ноги, руки), однако сравнительное изучение строения их скелета позволяет отчетливо проследить эволюционные преобразования от общей примитивной начальной формы.
Основная функция конечностей состоит у всех животных в локомоции, в перемещении животного в пространстве. Однако у многих членистоногих и позвоночных сюда добавляется еще функция опоры приподнятого над субстратом тела. Поэтому в этих случаях говорят об опорно-локомоторной функции конечностей. Не вдаваясь здесь в детальное рассмотрение разнообразных форм этой основной функции конечностей позвоночных, укажем лишь на некоторые существенные моменты.
Видный советский ученый Н. А. Бернштейн писал, что постепенно назревшая в филогенезе потребность в быстрых и мощных движениях — привела на одной из его ступеней к возникновению и параллельному развитию «костно-суставных кинематических цепей скелета» и поперечнополосатой мускулатуры, снабженной соответственными нервными образованиями. У позвоночных эти скелетно-мышечные системы («неокинетические системы», по Бернштейну) получают существенное прогрессивное развитие по сравнению с членистоногими, причем особенно это относится к рассматриваемым здесь высшим позвоночным, в частности к их локомоторным способностям. Бернштейн указывает в этом отношении на глубокие качественные различия между низшими и высшими позвоночными, обусловленные усложнением возникающих перед организмом двигательных задач, возрастанием разнообразия реакций, требующихся от организма, более высокими требованиями в отношении дифференцированности и точности движений. «Достаточно напомнить, — пишет Бернштейн, — насколько, например, аэродинамический полет птицы сложнее почти полностью гидростатического плавания рыбы или насколько богаче по контингентам участвующих движений охота хищного млекопитающего по сравнению с охотой акулы. Молодая отрасль проворных теплокровных млекопитающих победила тугоподвижных юрских завров именно своей более совершенной моторикой».[54]
В современных этологических исследованиях локомоторная активность изучается в ее видотипичных проявлениях как адаптация к специфическим условиям существования: разновидности и особенности ходьбы, бега, прыганья, лазанья, плавания, полета и т. д. определяются особенностями образа жизни и служат важным приспособлением к окружающей среде. Вместе с тем всем формам локомоции присуща ритмичность, выражающаяся в том, что движения выполняются в четкой последовательности многократно и относительно стереотипным образом (хотя поведение животного в целом при этом не является стереотипным). Эта ритмичность основана на эндогенной центрально-нервной стимуляции и проприоцепторной обратной связи. Помимо проприоцепторной чувствительности внешние импульсы лишь регулируют эти ритмы, соотносят их параметры (сила, скорость, длительность движений и т. д.) с конкретными условиями тех ситуаций, в которых оказывается животное. В частности, внешние раздражения вызывают начало или конец локомоторных движений, хотя и это может произойти в результате эндогенной стимуляции.
Сказанное достаточно поясняет тот факт, что локомоторные движения относятся к наиболее «автоматизированным» и однообразно выполняемым компонентам всей двигательной сферы животных. В этой же связи стоит и относительная малочисленность форм локомоции у каждого вида. Определяющей для локомоции является ее физическая, механическая функция. Сами локомоторные движения дают животному только минимальную информацию об окружающем мире.
При этом необходимо, правда, учесть, что локомоторная активность включает в себя и ориентировочные компоненты, имеющие, конечно, и определенное познавательнее значение. Так, например, прыгающие животные, особенно древесные, должны перед прыжком точно «рассчитать» расстояние. Как показали советские исследователи поведения животных В. М. Смирин и О. Ю. Орлов, это делается с помощью особых движений «взятия параллакса» (рис. 42). Оказавшись в новом месте, летяга «прицеливается» к разным предметам, это же она делает перед каждым прыжком, хотя со временем число таких движений уменьшается. В итоге уходящее от опасности животное придерживается заранее «отработанного» пути без лишних движений и совершает прыжки с поразительной точностью.
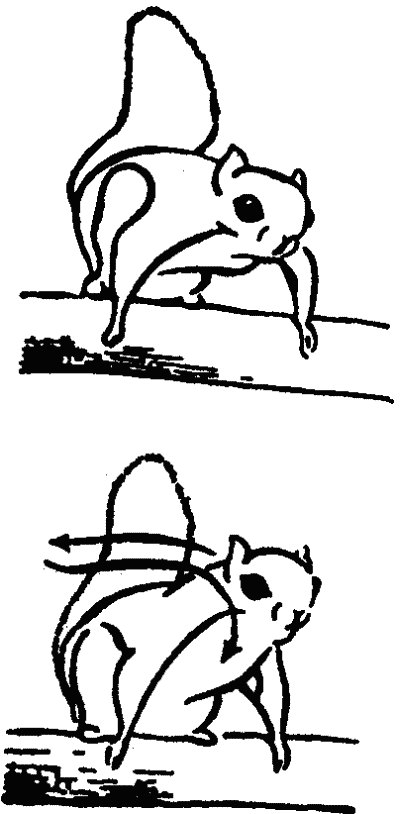
Рис. 42. Специфические движения летяги для определения удаленности предметов. Летяга «прицеливается» перед прыжком: приподнявшись, животное производит боковые движения головой в горизонтальной плоскости. Подобные ориентирующие движения животные производят особенно часто при передвижении в незнакомой местности (по Смирину и Орлову)
Манипулирование
Эффекторные органы позвоночных всегда выполняют сразу несколько функций — помимо основной функции еще большее или меньшее число дополнительных. В этом проявляется мультифункциональность этих органов. Что касается конечностей высших позвоночных, то, как уже отмечалось, их основой является опорно-локомоторная функция: все же дополнительные их функции сводятся к разнообразным формам манипулирования предметами (пищевыми или несъедобными). Особый интерес представляют для зоопсихолога формы манипулирования передними конечностями, которые в процессе эволюции привели к орудийной деятельности приматов и тем самым стали важнейшей биологической предпосылкой зарождения трудовых действий у древнейших людей.
Говоря о манипуляциях, дополнительных функциях передних конечностей у высших позвоночных, необходимо иметь в виду, что сложные и разнообразные дополнительные функции присущи у этих животных и ротовому аппарату, причем существует далеко идущее функциональное взаимодействие между этими двумя основными эффекторными системами. Поэтому целесообразно анализировать дополнительные функции передних конечностей и ротового аппарата в комплексе. Так, например, у взрослых лисиц обнаруживается 45 дополнительных функций передних конечностей и ротового аппарата, у барсука — 50, у енота — около 80, а у низших обезьян (макаков и павианов) — свыше 150 (данные Фабри).
Важно отметить, что по мере специализации млекопитающих в сфере локомоции часть дополнительных функций передних конечностей передается челюстному аппарату. Так, например, в ряду медведь — енот — барсук — лисица конечности лисицы в наибольшей степени приспособлены к продолжительному быстрому бегу. Но при этом дополнительные (манипуляторные) функции конечностей сводятся к минимуму и соответствующие жизненно необходимые движения (например, в сфере питания) выполняются почти исключительно ротовым аппаратом. Как раз наоборот обстоит дело у медведей.
Если иметь в виду познавательное значение манипулирования, то следует особенно выделить те его формы, при которых животное удерживает предмет перед собой свободно на весу обеими или одной конечностью. Такая фиксация предмета дает животному наилучшие возможности для комплексного (оптического, ольфакторного, тактильного, кинестетического и пр.) обследования, особенно в ходе деструктивного воздействия на него (практического анализа). По данным, полученным Фабри, это дает при известных условиях обезьянам, а отчасти и другим способным на это млекопитающим наиболее всестороннюю и разнообразную информацию, необходимую для развития высших форм психической активности. Оказалось, что медведи владеют тремя способами фиксации объекта на весу, еноты — шестью, низшие обезьяны и полуобезьяны — тремя десятками таких способов! К тому же только обезьяны обладают достаточно различными двигательными возможностями, чтобы произвести подлинный деструктивный анализ (расчленение) объекта на весу.