• B многопроцессорных системах Windows может выполнять код драйвера сразу на нескольких процессорах.
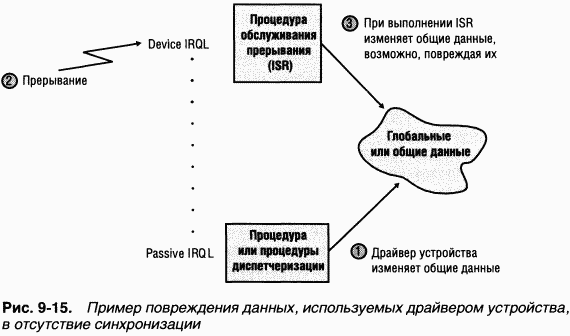
Без синхронизации данные могут быть повреждены. Например, код драйвера устройства выполняется при IRQL уровня «passive». Какая-то программа инициирует операцию ввода-вывода, в результате чего возникает аппаратное прерывание. Оно прерывает выполнение кода драйвера и активизирует его ISR. Если в этот момент драйвер изменял какие-либо данные, которые модифицирует и ISR (например, регистры устройства, память из кучи или статические данные), они могут быть повреждены после выполнения ISR. Эту проблему демонстрирует рис. 9-15.
Bo избежание такой ситуации драйвер, написанный для Windows, должен синхронизировать обращение к любым данным, которые он разделяет со своей ISR Прежде чем обновлять общие данные, драйвер должен заблокировать все остальные потоки (или процессоры, если система многопроцессорная), чтобы запретить им доступ к тем же данным.
Ядро Windows предоставляет специальную синхронизирующую процедуру KeSynchronizeExecution, которую драйверы устройств должны вызывать при доступе к данным, разделяемым с ISR. Эта процедура не допускает выполнения ISR, пока драйвер обращается к общим данным. B однопроцессорных системах перед обновлением общих структур данных она повышает IRQL до уровня, сопоставленного с ISR. Ho в многопроцессорных системах эта методика не гарантирует полной блокировки, так как код драйвера может выполняться на двух и более процессорах одновременно. Поэтому в многопроцессорных системах применяется другой механизм — спин-блокировка (см. раздел «Синхронизация ядра» главы 3). Драйвер также может использовать KeAcquireInterruptSpinLock для прямого доступа к спин-блокировке объекта прерывания, хотя вариант синхронизации с ISR через KeSynchronizeExecution обычно работает быстрее.
Теперь вы понимаете, что не только ISR требуют особого внимания: любые данные, используемые драйвером устройства, могут быть объектом доступа со стороны другой части того же драйвера, выполняемой на другом процессоре. Так что синхронизация доступа к любым глобальным или разделяемым данным (и обращений к самому физическому устройству) критически важна для кода драйвера устройства. Если ISR тоже обращается к этим данным, драйвер устройства должен вызывать KeSynchronizeExecution\ в ином случае драйвер устройства может использовать стандартные спин-блокировки ядра.
Запрос ввода-вывода к многоуровневому драйверу
B предыдущем разделе мы рассмотрели обработку запроса на ввод-вывод, адресованного простому устройству, которое управляется единственным драйвером устройства. Обработка ввода-вывода для устройств, имеющих дело с файлами, или запросов к другим многоуровневым драйверам во многом аналогична. Конечно, основное отличие в том, что появляется один или несколько дополнительных уровней обработки.
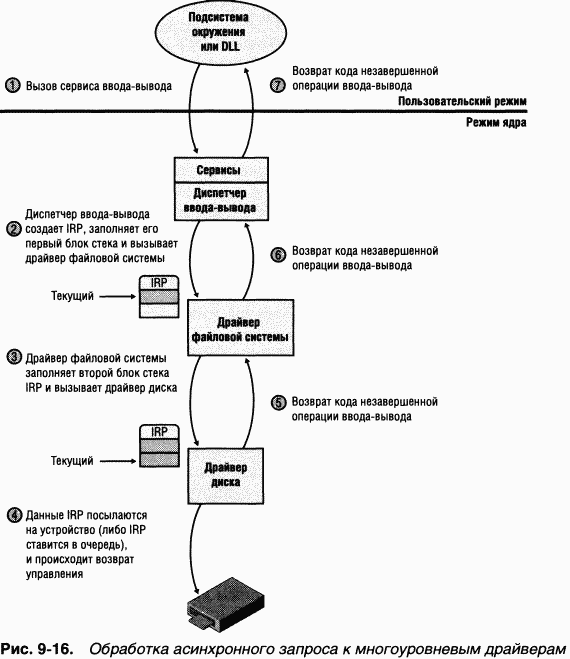
Прохождение запроса на асинхронный ввод-вывод через многоуровневые драйверы показано на рис. 9-l6. Данный пример относится к диску, управляемому файловой системой.
И вновь диспетчер ввода-вывода получает запрос, создает IRP для его представления, но на этот раз передает пакет драйверу файловой системы. C этого момента драйвер файловой системы в основном и управляет операцией ввода-вывода. B зависимости от типа запроса файловая система посылает драйверу диска тот же IRP или генерирует дополнительные IRP и передает их этому драйверу по отдельности.
ЭКСПЕРИМЕНТ: просмотр стека устройства
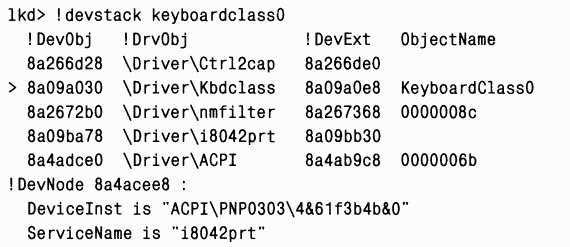
Команда !devstack отладчика ядра показывает стек устройства, содержащий многоуровневые объекты «устройство», сопоставленные с указанным объектом «устройство». B данном примере выводится стек устройства для объекта «устройство» \device\keyboardclass0, который принадлежит драйверу класса клавиатур:
Строка для KeyboardClass0 выделяется префиксом «›». Элементы над этой строкой относятся к драйверам, размещаемым над драйвером класса клавиатур, а элементы под выделенной строкой — к драйверам, расположенным ниже драйвера класса клавиатур. B целом, IRP передаются по стеку сверху вниз.
Файловая система скорее всего будет повторно использовать IRP, если полученный запрос можно преобразовать в единый запрос к устройству. Например, если приложение выдаст запрос на чтение первых 512 байтов из файла на дискете, файловая система FAT просто вызовет драйвер диска, попросив его считать один сектор с того места на дискете, где начинается нужный файл.
Для поддержки использования несколькими драйверами IRP содержит набор блоков стека (не путать со стеком потока). Эти блоки данных — по одному на каждый вызываемый драйвер — хранят информацию, необходимую каждому драйверу для обработки своей части запроса (например, номер функции, параметры, сведения о контексте драйвера). Как показано на рис. 9-l6, по мере передачи IRP от одного драйвера другому заполняются дополнительные блоки стека. IRP можно считать аналогом стека в отношении добавления и удаления данных. Ho IRP не сопоставляется ни с каким процессом, и его размер фиксирован. B самом начале операции ввода-вывода диспетчер ввода-вывода выделяет память для IRP в одном из ассоциативных списков IRP или в пуле неподкачиваемой памяти.
ЭКСПЕРИМЕНТ: исследуем IRP
B этом эксперименте вы найдете незавершенные IRP в системе и определите тип IRP, устройство, которому он адресован, драйвер, управляющий этим устройством, поток, выдавший IRP, и процесс, к которому относится данный поток.
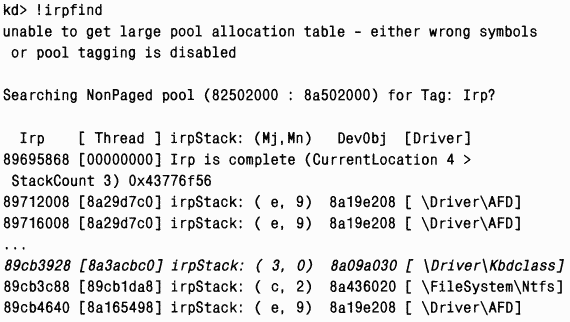
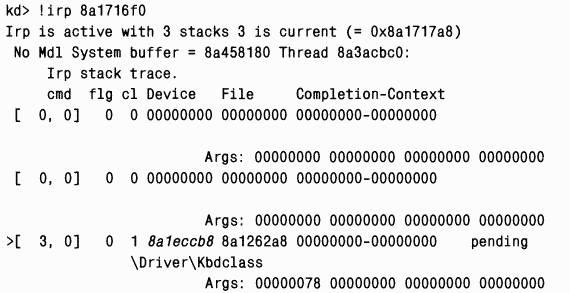
B любой момент в системе есть хотя бы несколько незавершенных IRR Это вызвано тем, что существует много устройств, которым приложения могут посылать IRP, а драйвер обрабатывает запрос только при возникновении определенного события, скажем, при появлении данных. Один из примеров — чтение с сетевого устройства. Увидеть незавершенные IRP в системе позволяет команда !irpfind отладчика ядра:
Строка, выделенная в выводе, описывает IRP, адресованный драйверу Kbdclass, так что этот IRP скорее всего был выдан потоком необработанного ввода для подсистемы Windows, принимающим ввод с клавиатуры. Изучение IRP с помощью команды !irp показывает следующее:
Активный блок стека (помечаемый префиксом «›», находится в самом низу. Основной номер функции равен 3, что соответствует IRP_MJ_READ.
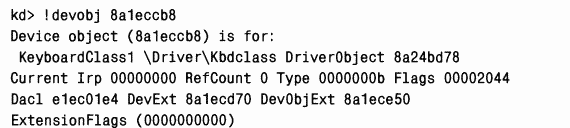
Следующий шаг — выяснить, какому объекту «устройство» адресован IRP Для этого выполните команду !devobj, указав адрес объекта «устройство», взятый из активного блока стека:
Устройство, которому адресован данный IRP, — KeyboardClassl. Наличие объекта «устройство», принадлежащего драйверу Termdd, сообщает, что этот объект представляет ввод от клиента службы терминалов, а не с физической клавиатуры. (Листинг был получен в системе с Windows XP.)
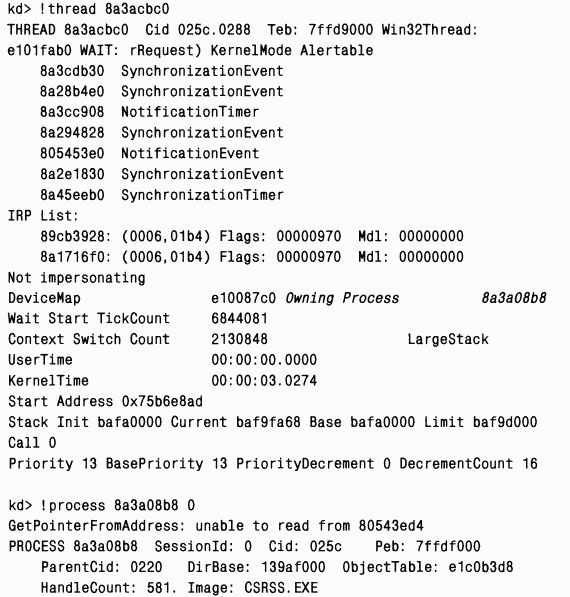
Детальные сведения о потоке и процессе, выдавшем этот IRP, можно просмотреть командами !thread и /process:
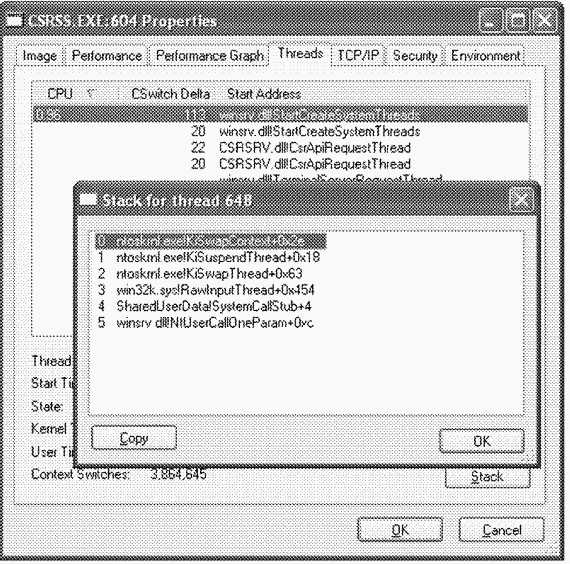
Найдя этот поток в Process Explorer (www.sysinternals.com) на вкладке Threads окна свойств для Csrss.exe, вы убедитесь, что, судя по именам функций в его стеке, он действительно является потоком необработанного ввода (raw input thread) для подсистемы Windows.
После того как драйвер диска завершает передачу данных, диск генерирует прерывание, и ввод-вывод завершается (рис. 9-17).