Алгоритм DPM сначала извлекает признаки из входного изображения с помощью средства извлечения признаков, такого как гистограмма ориентированных градиентов (HOG) или сверточная нейронная сеть (CNN). Эти признаки затем передаются через классификатор, который обучен различать. между объектом и фоновыми признаками Классификатор выводит оценку для каждого признака, указывающую вероятность того, что признак принадлежит объекту.
Модель деформируемых частей затем используется для моделирования формы и положения объекта. Модель состоит из набора частей, каждая из которых связана с определенным местоположением и ориентацией. Части соединены пружинами, которые позволяют изменять форму объекта. и поза Модель обучена минимизировать разницу между прогнозируемой формой объекта и фактической формой объекта, а также разницу между прогнозируемой и фактической позой объекта.
После обучения модели ее можно использовать для обнаружения объектов на новых изображениях. Алгоритм сначала извлекает признаки из входного изображения с помощью экстрактора признаков. Затем эти признаки передаются через классификатор, который выводит оценку для каждого признака. Модель деформируемых частей затем используется для объединения оценок отдельных элементов в оценку всего объекта. Алгоритм ищет объект с наивысшей оценкой на изображении и возвращает ограничивающую рамку и метку класса для этого объекта.
Алгоритм DPM использовался для достижения самых современных результатов в нескольких тестах обнаружения объектов, включая наборы данных PASCAL VOC и ILSVRC. Алгоритм также широко используется в практических приложениях, таких как автономное вождение, наблюдение и робототехника.
Пример того, как алгоритм DPM можно использовать для обнаружения объектов на изображении:
import cv2
import numpy as np
from sklearn.externals import joblib
# Load the trained DPM model
model = joblib.load('dpm_model.pkl')
# Load the input image
img = cv2.imread('input.jpg')
# Convert the image to grayscale
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Detect objects in the image using the DPM algorithm
rects = model.detect(gray, threshold=0.5)
# Draw the bounding boxes around the detected objects
for rect in rects:
x, y, w, h = rect
cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2)
# Display the output image
cv2.imshow('Output', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
В этом примере мы сначала загружаем обученную модель DPM из файла. Затем загружаем входное изображение и преобразуем его в оттенки серого. Мы используем метод обнаружения () модели для обнаружения объектов на изображении и рисуем ограничивающие рамки вокруг него. обнаруженные объекты с помощью функции прямоугольника() из библиотеки OpenCV. Наконец, мы отображаем выходное изображение с помощью функции imshow() из библиотеки OpenCV.
Обратите внимание, что параметр порога в методе обнаружения() контролирует минимальный балл, необходимый для того, чтобы объект считался частью объекта. Регулируя этот параметр, мы можем контролировать компромисс между точностью и полнотой в алгоритме обнаружения объекта.
В целом, алгоритм DPM является мощным инструментом для обнаружения объектов на изображениях. Используя модель деформируемых деталей для моделирования формы и положения объекта, алгоритм способен обрабатывать изменения во внешнем виде объекта и достигать самых современных результатов в некоторых случаях. тесты обнаружения объектов.
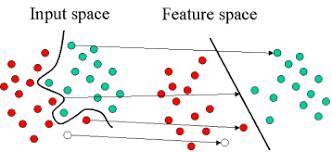
Модель деформируемых объектов состоит из нескольких частей, каждая из которых характеризуется собственным набором признаков. Части могут быть деформированы и перемещены относительно друг друга, чтобы соответствовать вариациям в форме и расположении объекта.
Для обнаружения объекта на изображении используется алгоритм гребешковых меток (Latent SVM), который учитывает вариации в форме и расположении объекта. Алгоритм основан на использовании латентных переменных, которые представляют собой деформации и расположения частей объекта.
2.3: Пример модели деформируемых частей
Метод деформируемых частей широко используется для обнаружения объектов, таких как пешеходы и машины, и он является одним из самых эффективных методов обнаружения objects на сегодняшний день.
Основные шаги, необходимые для обучения и использования традиционных методов обнаружения объектов
В этом разделе мы опишем основные шаги, необходимые для обучения и использования традиционных методов обнаружения объектов.
Шаг 1: Подготовка данных
Подготовка данных включает в себя сбор набора положительных и отрицательных примеров, предварительную обработку изображений и выделение признаков.
Шаг 2: Обучение классификатора
Обучение классификатора включает в себя подбор параметров алгоритма, обучение классификатора на наборе положительных и отрицательных примеров и тестирование классификатора на независимом наборе тестовых данных.
Шаг 3: Обнаружение объектов на изображениях
Обнаружение объектов на изображениях включает в себя применение обученного классификатора к изображению и поиск областей, которые соответствуют объекту.
Конец ознакомительного фрагмента.
Текст предоставлен ООО «Литрес».
Прочитайте эту книгу целиком, купив полную легальную версию на Литрес.
Безопасно оплатить книгу можно банковской картой Visa, MasterCard, Maestro, со счета мобильного телефона, с платежного терминала, в салоне МТС или Связной, через PayPal, WebMoney, Яндекс.Деньги, QIWI Кошелек, бонусными картами или другим удобным Вам способом.