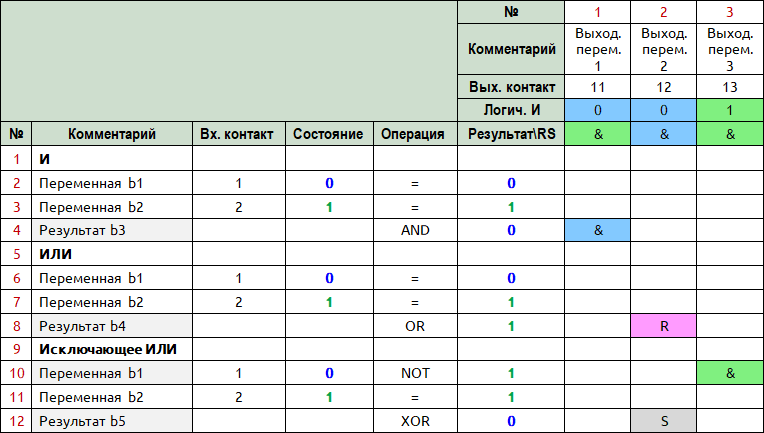
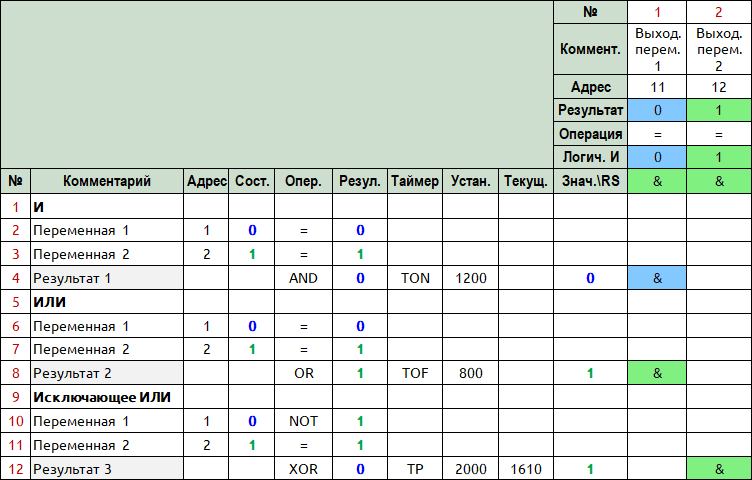
Добавим в таблицу столбцы, необходимые для выполнения операций над входными значениями. Чтобы улучшить читаемость программы, немного изменим внешний вид таблицы. Вставим дополнительные строки, которые будут разделять программу на блоки, а комментарии в строках, имеющих активные ячейки, выделим светло-серым фоном. Фон в остальных ячейках оставим белым. Табличная программа с внесенными изменениями показана на рис. 4.
Рис. 4. Табличная программа с логическими операциями над входными переменными
Сначала рассмотрим возможность инвертирования входных логических сигналов для дальнейшего использования в программе. Одни сигналы, поступающие на вход контроллера, могут приходить с датчиков, имеющих нормально открытый контакт (НО), и при срабатывании такого датчика на входе контроллера будет уровень, соответствующий единице. Другие же датчики могут иметь нормально замкнутый контакт (НЗ), и при их срабатывании на входе контроллера появится ноль. Реализуемый в программе алгоритм может потребовать инвертированных входных сигналов. Если инверсии не требуется, запишем в ячейку операции знак «=». Для инверсии входного значения в ячейку операции запишем слово «NOT». В строке 10 таблицы на рис. 4 значение переменной b1 сначала инвертируется, а потом участвует в логической операции «исключающее ИЛИ».
Далее рассмотрим применение основных логических операций – «И», «ИЛИ», «исключающее ИЛИ» – для обработки входных переменных перед присвоением результата активным ячейкам таблицы. Так как для операций «И», «ИЛИ», «исключающее ИЛИ» требуются не менее двух аргументов, то две строки будут формировать аргументы, а результат поместим в третью строку. Конструкция будет напоминать арифметическое действие в столбик. Многострочные логические операции производятся над данными в столбце «Результат», и в этом же столбце записывается ответ. Расположение в одном столбце операндов и результата операции позволяет использовать полученный результат в качестве одного из операндов для следующей операции. На рис. 4 в ячейке «Результат» строки 4 будет ответ на логическое И содержимого двух ячеек, расположенных выше. Аналогично – в строке 8 для операции логическое «ИЛИ» и в строке 12 для операции «исключающее ИЛИ». В обычном для текстовых языков программирования виде это будет выглядеть следующим образом:
– строка 4: b3 = b1 AND b2 // 0 AND 1 = 0;
– строка 8: b4 = b1 OR b2 // 0 OR 1 = 0;
– строка 12: b5 = NOT (b1) XOR b2 // 1 XOR 1 = 0.
1.5. Инверсия выходных переменных
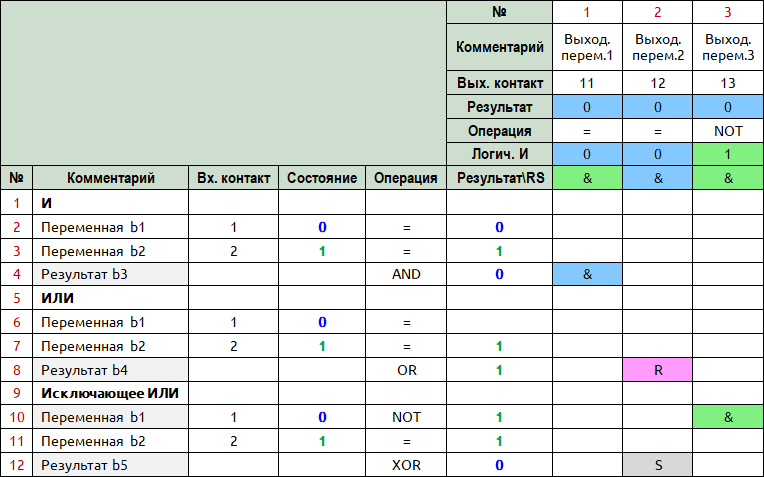
Иногда бывает необходимо, чтобы один из выходных сигналов контроллера был инвертирован – например, если в схеме устройства используется сигнал, состояние которого должно быть равным нолю, когда результат логического И по столбцу дает единицу. Чтобы реализовать такую возможность, дополним верхний заголовок таблицы двумя строками: «Операция» и «Результат» (рис. 5).
Рис. 5. Табличная программа с логическими операциями над входными и выходными переменными
Для выходных переменных, которым не требуется инверсия, в ячейку «Операция» запишем «=», а для переменных, значение которых нужно инвертировать, запишем «NOT». В приведенном на рис. 5 примере выходной переменной 3 присваивается инвертированное значение логического И по столбцу 3 с помощью операции «NOT».
1.6. Таймеры
Управление оборудованием часто требует жестких временных рамок. Иногда требуется задержка между последовательным включением механизмов или систем, иногда наоборот – между последовательным их выключением. Наиболее ответственные операции должны выполняться за определенное время, и если этого не происходит, то оператору выдается предупреждение или происходит остановка процесса. Для формирования временных интервалов в программах контроллеров используются различные таймеры. Наиболее распространенные – таймер с задержкой на включение TON (timer on delay), таймер с задержкой на выключение TOF (timer off delay), таймер, формирующий импульс заданной длительности, TP (timer pulse). Рассмотрим алгоритм работы каждого из них.
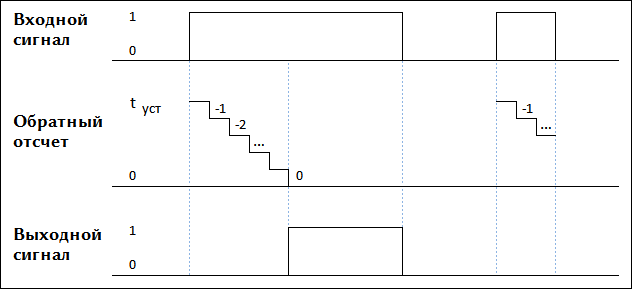
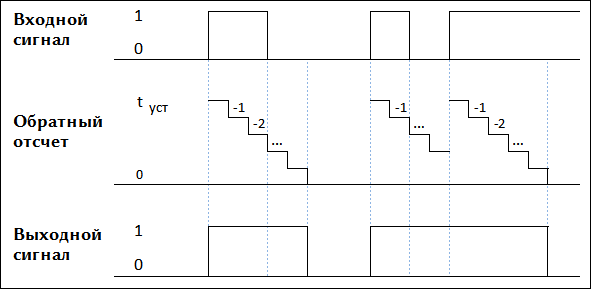
В исходном состоянии на выходе таймера с задержкой на включение TON будет ноль (рис. 6). При переходе сигнала на его входе из ноля в единицу, то есть по переднему фронту сигнала, запускается обратный отсчет времени начиная со значения, предустановленного в параметрах таймера.
Рис. 6. Временная диаграмма таймера с задержкой на включение TON
При достижении счетчиком нулевого значения на выходе таймера устанавливается единица. То есть сигнал, установившийся на входе таймера, появляется на выходе не сразу, а через заданное время. При возвращении входного сигнала в нулевое состояние выход таймера тоже будет равен нолю без какой-либо задержки. Если входной сигнал станет равным нолю до истечения предустановленного времени, то обратный отсчет прекратится, таймер перейдет в начальное состояние и сигнал на выходе не появится.
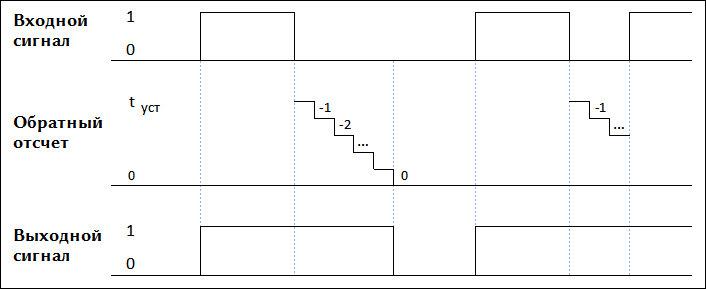
У таймера с задержкой на выключение TOF в исходном состоянии на выходе будет ноль (рис. 7). При переходе входного сигнала из ноля в единицу на выходе таймера будет единица без какой-либо задержки.
Рис. 7. Временная диаграмма таймера с задержкой на выключение TOF
А при переходе сигнала на его входе из единицы в ноль, то есть по заднему фронту сигнала, запускается обратный отсчет времени начиная со значения, предустановленного в параметрах таймера. При достижении счетчиком нулевого значения выход таймера перейдет в ноль. То есть установившийся на входе таймера ноль появится на выходе не сразу, а через заданное время. Если входной сигнал станет единицей до истечения предустановленного времени, то обратный отсчет прекратится, таймер перейдет в начальное состояние и на выходе останется единица.
В исходном состоянии на выходе импульсного таймера TP будет ноль (рис. 8). При переходе сигнала на его входе из ноля в единицу, то есть по переднему фронту сигнала, на выходе таймера будет единица без какой-либо задержки. Сразу же запускается обратный отсчет времени начиная со значения, предустановленного в параметрах таймера. При достижении счетчиком нулевого значения на выходе таймера устанавливается ноль. Таким образом, по переднему фронту будет сформирован импульс заданной длительности. Возвращение входного сигнала в нулевое состояние до истечения заданного времени не повлияет на формирование импульса. Если входной сигнал снова станет единицей и будет сформирован передний фронт, то таймер будет перезапущен и отсчет начнется заново.
Рис. 8. Временная диаграмма таймера, формирующего импульс заданной длительности, TP
Чтобы при необходимости в программе можно было формировать временные интервалы, добавим в таблицу три столбца. Первый соответствует типу используемого таймера, второй – установленному времени, третий – текущему состоянию внутреннего счетчика таймера. Дополнительно сократим названия колонок и отформатируем таблицу. Табличная программа с внесенными изменениями представлена на рис. 9.
Рис. 9. Пример использования таймеров