Характерные неисправности ВРШ и методы их устранения приводятся в заводской инструкции и в [10,18]. Основными причинами неисправностей являются: неисправности в системе управления (плохие контакты, обрыв цепи, попадание воды, грязи в электромагниты), утечки масла, подсос воздуха в систему, повреждения резиновых колец уплотнения МИШ, чрезмерный износ, механические повреждения лопастей обтекателя.
В случае отказа системы гидропривода поворота лопастей ВРШ, при падении давления масла, предусматриваются запирание полостей цилиндра при помощи обратных клапанов. Если зафиксированное таким образом положение лопастей не обеспечивает передний ход, то предусматривается возможность возвращения поршня сервомотора МИШ на передний ход при помощи отжимных болтов или расположенных в ступице пружин.
1.4.4. Конструкция и техническое использование крыльчатых движителей
При эксплуатации некоторых судов (плавучие краны, кабелеукладчики, буксиры, суда для подъема затонувших судов и других объектов) требуется столь точное позиционирование, что его невозможно будет достигнуть при помощи ВРШ, рулей и даже поворотных насадок. В этих случаях применяют крыльчатые движители (КД).
Крыльчатые движители одновременно выполняют функции движителя и руля. Они нашли достаточно широкое применение на кабелеукладчиках, судах для подъема затонувших объектов, портовых буксирах (особенно в портах Восточной Азии), на плавкранах («Черноморец», «Богатырь») а, также в меньшей степени, на тральщиках, рыболовецких судах, в качестве подруливающих устройствах. На голландском буксире «Multratug 32» применена более эффективная схема с разнесенными в нос и корму крыльчатками.
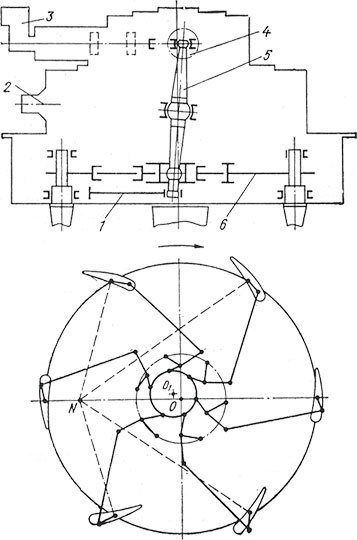
КД, кроме изменения шага, позволяет также менять направление упора относительно судна. КД представляет собой ротор, установленный заподлицо с днищем судна. По окружности ротора расположены лопасти, которые вращаются вместе с ротором и одновременно совершают колебательные движения вокруг собственных осей. Результирующей траекторией движения оси лопасти является циклоида. Движения лопастей осуществляются при помощимеханизма привода лопастей, который состоит из системы рычагов и тяг, расположенных внутри ротора. Эти колебательные движения происходят таким образом, что перпендикуляры, проведенные к хордам лопастей и проходящие через их центры, пересекаются приблизительно в одной точке, называемой центром управления (точка N на рис. 1.29).
Рис. 1.29. Схема устройства крыльчатого движителя
Лопасти соединены системой рычагов и тяг механизма привода с управляющим диском, центр которого обозначен точкой О1. Положение центра управляющего диска определяет положение центра управления (точка N).
Крыльчатый движитель создает усилие упора в направлении, перпендикулярном линии, соединяющей центр ротора O с центром управления (точка N).
Когда центр управляющего диска совпадает с центром ротора, центр управления N находится в центре ротора, лопасти располагаются касательно к окружности и не имеют колебательного движения при вращении ротора. В этом случае упор движителя равен нулю. При увеличении эксцентриситета ОО1 точка N смещается из центра ротора. увеличиваются углы отклонения лопастей и упор движителя.
Управляющий диск перемещается и удерживается в заданном положении рулевым и ходовым сервомоторами при помощи управляющего рычага. С помощью ходового сервомотора управляющий диск смещается так, что центр управления перемещается по линии, нормальной к диаметральной плоскости (ДП) судна. При этом упор может изменяться от наибольшего значения, направленного к носу судна, до наибольшего, направленного к корме. Линия действия упора остается при этом параллельной диаметральной плоскости судна. Рулевой сервомотор позволяет получить упор, перпендикулярный ДП. С помощью комбинации движений рулевого и ходового сервомоторов можно получить любой упор от нуля до максимума и направить его в любом направлении по отношению к судну.
Подготовка движителя к работе начинается с осмотра и заполнения его рабочим маслом. После заполнения маслом необходимо прокачать его электронасосом в течение 15 минут, контролируя давление масла и температуру. Если температура масла в движителе ниже +10°С, то необходим его подогрев.
В период прокачки производится перекладка управляющего рычага, чтобы обеспечить попадание масла в места подвижных соединений. Ведущий вал движителя при этом проворачивают на один-два оборота ротора.
Далее производится контроль состояния системы охлаждения уплотнения вала ротора, чтобы предотвратить попадание забортной воды внутрь судна и вытекание рабочего масла из движителя. Количество подаваемой на уплотнение охлаждающей регулируется (приблизительно из расчета 1 л в минуту при полных оборотах ведущего вала движителя). В случае конструктивного исполнения с масляным подпором проверяется наличие масла в межманжетном пространстве уплотнения ротора.
Осуществляем пуск. Для движителей типа ДКК 20/5 время выхода масляного насоса на режим рабочего давления составляет не более 10 с от момента запуска движителя. При частоте вращения ведущего вала до 220 об/мин давление смазочного масла может быть меньше нормального (1,7–2,5 бар), но не ниже 0,5 бар.
Управление режимом работы КД, производится дистанционно из рубки судна.
Перекладка рычагов поста (т. е. управление сервомоторами) должна производиться так, чтобы исключалась возможность перегрузки приводного двигателя.
Для удобства управления движителями и судном рычаги управления ходовых и рулевых сервомоторов движителей левого и правого бортов блокируют для совместного управления.
Ход лагом получают, осуществляя раздельное управление ходовыми сервомоторами движителя левого и правого бортов. Направление и относительную величину упора можно проконтролировать по диаграмме, расположенной на верхнем корпусе движителя.
При работе КД контролируются давления масла на управление и смазку, температура рабочего масла, и давление воды на уплотнение вала ротора, уровни масла в нижнем корпусе движителя и напорных бачках; отсутствие постороннего шума и плавность работы рычага управления. Необходимо также регулярно промывать фильтрующие элементы.
Проверяется поступления воды на охлаждение нижнего уплотнения вала ротора (вода может не поступать на слив из уплотнения). Если манометр подтверждает поступление воды к уплотнению, то отсутствие воды на выходе не должно беспокоить обслуживающий персонал, так как в этом случае вода, охладив уплотнение, уходит в зароторное пространство.
Выход на режим полной нагрузки разрешается после достижения температуры масла в корпусе 15…20°С.
В случае выхода из строя дистанционного управления необходимо перейти на аварийное управление с помощью рычагов, расположенных на сервомоторах. Перекладка рычагов производится плавно, без рывков. Время перекладки рычагов из одного крайнего положения в другое должны быть не более 7 сек.
Гидросистема движителя является одним из основных органов, обеспечивающих работу движителя.
Вязкость смеси масла выбирается в зависимости от нагруженности движителя. Необходимость составления смеси масел диктуется требованием обеспечения необходимой скорости деэмульсации масла (не более 15 мин), так как возможно попадание воды в масло. Турбинное масло обладает высокой скоростью деэмульсации.
Применяемое масл должно обеспечить работу редуктора (вязкое масло) и надежную смазку трущихся соединений. Но вязкое масло в чистом виде трудно перекачивается через движитель, если температура масла ниже 10°С. Поэтому иногда используют смеси масел. В авиационное масло добавляют турбинное масло в такой пропорции, чтобы обеспечить необходимую вязкость смеси.
Вязкость смеси масел составляет: для средненагруженных КД (типа ДКК 20/5) 59–62 сСт при 50°С; для высоконагруженных КД (типа ДКК 26/6) 85–87 сСт при 50°С. Смесь масел для КД составляют согласно специальной инструкции, которая входит в состав эксплуатационной документации.