ЖУРНАЛ «ЮНЫЙ ТЕХНИК»
НАУКА ТЕХНИКА ФАНТАСТИКА САМОДЕЛКИ
№ 2 январь 2011
Популярный детский и юношеский журнал.
Выходит один раз в месяц.
Издается с сентября 1956 года.
ВЫСТАВКИ
Для тех, кто нас кормит
Очередная, XII Российская агропромышленная выставка «Золотая осень», прошедшая на ВВЦ, в этот раз показала немало любопытного. Вот некоторые новинки, которые там отметил наш специальный корреспондент Станислав СЛАВИН.
Киберводитель для трактора
Идея, что называется, давно носилась в воздухе. Летают в небе самолеты с автопилотами, плавают в морях корабли с киберрулевыми. Так почему бы не создать кибершоферов и кибертрактористов?
Это легко сказать, но довольно трудно сделать. Мы уже не раз рассказывали вам, как идут дела с вождением автомобилей с помощью компьютера. Решен лишь первый этап этой проблемы. Ныне во многих автомобилях стоят GPS-навигаторы, которые позволяют водителям быстро находить путь. Но полностью доверить управление автомобилем автоматике инженеры пока не решаются. Слишком уж медленно она реагирует на дорожную обстановку.
Чуть легче оказалось решить эту проблему с сельскохозяйственной техникой. Ведь на поле трактор, как правило, один, и столкновений ожидать не приходится, а потому для управления вполне можно использовать систему GPS/ «ГЛОНАСС». Но одной только системой глобального позиционирования здесь не обойтись. Она позволяет определить местонахождение объекта в безоблачную погоду с точностью до 1–2 м, а трактору нужна точность один-два сантиметра, иначе он срежет все, что уже посеяли… При пахоте тоже необходима точность. И при севе… И при уборке…
Тем не менее, решение уже найдено.
На выставке демонстрировалась универсальная голландская автоматическая система управления «SBGuidance», которая предназначена для работы с самыми различными сельскохозяйственными культурами и любыми сельскохозяйственными машинами.
Сейчас 29 спутников «GPS» и 17 спутников «ГЛОНАСС» посылают сигналы на Землю и используются для определения местоположения. «SBGuidance» может использовать как GPS-сигналы, так и сигналы «ГЛОНАСС». Однако, чтобы машины двигались точнее, посылает со своей корректирующей станции дополнительные сигналы, позволяющие позиционировать положение машин на поле с точностью 1–2 см, передавая сигнал на трактор или комбайн с помощью мобильного Интернета на расстояние до 20 км от передатчика.
В Голландии — в одной из самых развитых сельскохозяйственных стран мира — система «SBGuidance» уже широко используется. Фермеры там иногда доверяют управление машинами своим сыновьям-школьникам — настолько проста и удобна эта киберсистема. Теперь она доступна и в России.
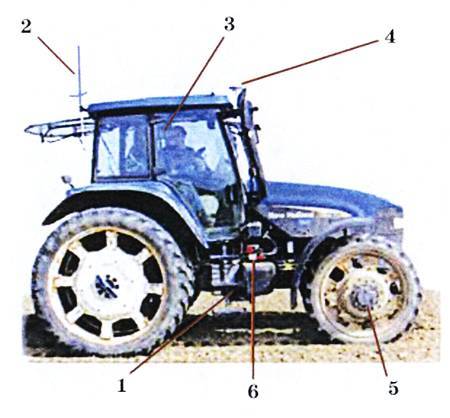
Схема расположения системы автоматического управления на тракторе:
1 — бокс датчиков; 2 — радиоантенна; 3 — терминал; 4 — GPS-антенна; 5 — датчик определении угла колеса; 6 — контроль гидравлики.
Капельный полив
Еще в 30-е годы XX века наш знаменитый селекционер И.В. Мичурин говорил, что удобрение нужно не высыпать на землю вокруг растений, а подавать прямо к их корневой системе. Со временем идею взяли на вооружение израильтяне, разработавшие систему так называемого капельного полива. Они не ленятся прокладывать на каждом поле подземную водопроводную систему. Вода с питательными веществами при поливе распространяется по трубам прямо к корням растений, не испаряясь понапрасну под жарким южным солнцем. А потому даже в пустыне специалисты Израиля ухитряются выращивать столько овощей и фруктов, что хватает даже для России.
Теперь эта технология принята на вооружение во всем мире. Причем, чтобы упростить прокладку трасс водопровода, разработана специальная техника. Вот как, например, выглядит система капельного орошения в исполнении ВНИИ систем орошения и сельхозводоснабжения «Радуга».
Этот маленький, как бы игрушечный, трактор китайского производства предназначен для обработки малых полей и приусадебных участков.
Пневматические сеялки, буквально «стреляющие» в почву семенами, могут сразу засевать полосу шириной до 12 м.
По полю движется колесный трактор с тремя огромными катушками, на которых намотаны пластиковые шланги с небольшими дырочками. Трактор движется, шланги разматываются, а с помощью культиватора их заглубляют в почву и присыпают сверху землей. Глубина заделки зависит от той культуры, которая растет на данном поле, и колеблется от 10 до 40 см.
В конце поля пластиковые трубки подсоединяют к магистральному трубопроводу, оборудованному узлом ввода удобрений, клапаном с регулятором давления и прочими приспособлениями.
Процедура полива сведена к минимуму. Достаточно оператору открыть задвижку на магистральном трубопроводе, и вода буквально по каплям начинает поступать к корням растений. По осени, перед уборкой урожая, тот же трактор проходит по полю еще раз, сматывая пластиковые трубки до следующей весны. Система уже испытана и с успехом применяется в поселке Радужный Коломенского района Московской области.
Помощник Геракла
В нашей стране за трудное дело роботизации сельского хозяйства одними из первых взялись сотрудники Академии инженеров сельскохозяйственного производства под руководством кандидата технических наук В. Васянина. Еще в 80-е годы XX века они начали создавать первые сельхозроботы.
Одним из них был мобильный автономный робот МАР-1, который предназначался для ухода за животными. Конечно, чтобы как следует выполнять свои обязанности, такой робот должен уметь различать и двери коровника, и самих коров, отыскивать необходимый инвентарь — лопату или ведро…
Человеческий мозг сравнивает увиденное с тем изображением, которое хранится в его памяти. Так должен поступать и робот, решили ученые. А роль памяти — хранительницы «галереи» образов — они доверили видеомагнитофону. Специальный прибор — телевизионная сравнивающая трубка — сличал изображение, принятое телекамерой, с записями на ленте видеомагнитофона. Если изображения совпадали, появлялся электрический сигнал, который означал, что робот узнал увиденное. И тогда он брал нужный ему предмет, скажем, то же ведро.
Трактор для обработки виноградников. Под его шасси свободно пройдет даже самый высокий баскетболист.
Так выглядит робот-уборщик, стоящий у зарядной станции.
Робот МАР-1 прошел серию испытаний, но на том все и кончилось. Причин тому было множество. Одна из них — техника того времени не позволяла полностью реализовать идею. Даже сейчас, когда вместо видеомагнитофона можно использовать мощные блоки быстрой памяти и сверхскоростные процессоры, создать робота, который бы один выполнял все работы на ферме — задача архисложная. До конца она не решена и по сей день. А потому вместо роботов-универсалов инженеры предпочитают создавать узкоспециализированных роботов. Одни кормят коров, другие их доят, третьи убирают навоз…