Тяга, развиваемая РДТТ, передается на последующие отсеки или ракетные блоки (в составной ракете поперечного деления) с помощью переходной стержневой фермы или подкрепленной стрингерами оболочки. Чтобы иметь возможность выключить РД до полного выгорания топлива и отделить корпус РДТТ от головной части боевой ракеты, на его переднем днище могут быть предусмотрены наклонные сопла обратной тяги. При достижении определенного сочетания значения скорости полета, ее направления и координат ракеты по специальной команде системы управления эти сопла открываются и направляют газовый поток из камеры сгорания через переднее днище корпуса, создавая обратную тягу, обеспечивающую разделение.
Система управления ракеты предназначена для получения параметров движения в конечной точке участка выведения, необходимых для выполнения поставленной перед ракетой задачи. Одновременно СУ должна обеспечивать решение задачи устойчивости движения и снижения внешних нагрузок на корпус ракеты. В простейшем случае траектория выведения ракеты задается заранее. В более сложном применяется терминальная система управления, которая не приводит траекторию к заданной, а допускает существенные отклонения от нее, следя, однако, за тем, чтобы кинематические параметры в конце активного участка были расчетными. Последний метод требует применения мощных цифровых ЭВМ.
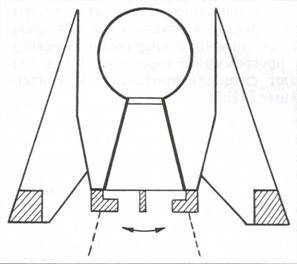
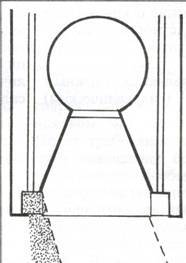
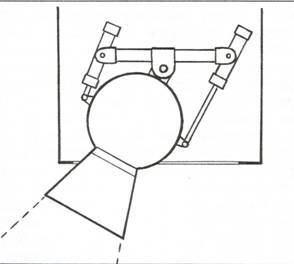
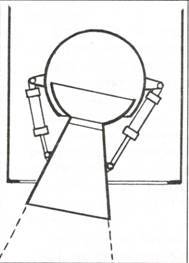
Способы получения управляющих усилий
Применение газодинамических и вспомогательных аэродинамических рулей малой площади
Метод впрыска в закритическую часть сопла жидкого газа
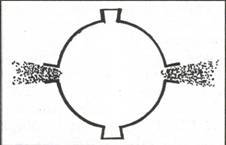
Применение газоотк лоняющих пластин
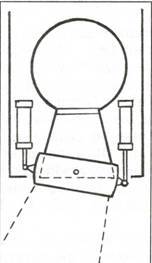
Поворот камеры сгорания
Применение отклоняемого сопла камеры сгорания
Применение управляющего соплового дефлектора
Применение верньерных или струйных двигателей
СУ состоит из датчиков, преобразующих устройств и рулевых машин. В качестве датчиков обычно используются гироскопические стабилизированные платформы, сохраняющие свое положение относительно неподвижных звезд неизменным и позволяющие измерять углы отклонения корпуса ракеты относительно связанной с такими платформами системы координат. На ГСП устанавливаются приборы, реагирующие на линейные ускорения в продольном и двух поперечных направлениях. Интегрируя нужное число раз сигналы, снимаемые с этих приборов, можно получить полное представление о кинематике движения ракеты, в частности о скоростях и сносах в поперечных к траектории направлениях.
Рулевые машины являются сложным электромеханическим (гидравлическим) приводом для поворотов основного РД или специальных рулевых РД в соответствии с сигналами, вырабатываемыми преобразующими устройствами. Помимо основных задач СУ выполняет и другие функции: подачу питания на нужные приборы, программно-логическое управление работой систем ракеты при подготовке и старте ракеты, взведение взрывательных устройств. Высокие требования, которые предъявляются к надежности СУ, приводят к необходимости дублирования и резервирования наиболее ответственных контуров управления.
Обеспечивает работу системы управления бортовая цифровая вычислительная машина. Она предназначена для решения на борту движущегося объекта (ракеты) задач управления движением и стабилизацией, автономной и инерциальной навигации, программного управления и т. д. Различают специализированные и универсальные БЦВМ.
Глава 2. Баллистические ракеты средней дальности
Накопленный опыт в создании первых баллистических ракет военного назначения позволил конструкторам заняться проектированием ракет с повышенной дальностью. Первыми к этим работам приступили советские ракетчики. Сразу по окончании работ по ракете Р-2 от правительства в 1952 г. поступило распоряжение спроектировать ракету с дальностью полета более 1000 км. Задание поручили ЦКБ-1. Уже в 1953 году ракета, получившая обозначение Р-5, была представлена на летные испытания, которые проводились на полигоне Капустин Яр.
Испытания проходили с переменным успехом. Несмотря на все сложности, доводка ракеты продолжалась. Р-5 была выполнена одноступенчатой, с жидкостным ракетным двигателем, работающим на жидком кислороде (окислитель) и 92-процентном этиловом спирте (горючее). В качестве маршевого двигателя применили усовершенствованный ЖРД от ракеты Р-2, получивший обозначение РД-103. Он был выполнен однокамерным, с ТНА, приводимым в действие продуктами каталитического разложения концентрированной перекиси водорода в газогенераторе. Двигатель имел улучшенную систему охлаждения головок камеры сгорания и сопла. Были введены сильфонные трубопроводы для окислителя и эластичные — для горючего, установлен центробежный насос для подачи перекиси водорода, улучшена общая компоновка. Изменения претерпели все системы и элементы ЖРД. Все это позволило довести тягу двигателя на земле до 41 т, при этом общая высота двигателя снизилась на 0,5 м, а его масса уменьшилась на 50 кг.
Совершенствование конструкции ракеты дало положительные результаты. Во время летных испытаний дальность полета достигла 1200 км.
Ракета оснащалась головной частью, снаряженной обычным взрывчатым веществом, что мало устраивало военных. По их требованию конструкторы искали пути повышения боевых возможностей. Было найдено необычное решение. Кроме стандартной головной части, на Р-5 предложили навесить два, а чуть позже и четыре дополнительных боевых заряда. Это позволило бы обстреливать площадные цели. Летные испытания подтвердили жизненность идеи, но при этом дальность полета снижалась до 820 и 600 км соответственно.
Создание в 1953 году советскими ядерщиками малогабаритного ядерного заряда, пригодного для размещения на ракетах, открыло путь к резкому повышению боевых возможностей ракет. Это было особенно важно для Советского Союза, который, в отличие от США, не имел мощной стратегической авиации. 10 апреля 1954 года вышло в свет постановление правительства о создании ракеты, оснащенной ядерной ГЧ на базе испытываемой Р-5.
Менее чем через год, 20 января 1955 года, на полигоне Капустин Яр состоялся первый испытательный пуск ракеты Р-5М. Именно такой индекс решили присвоить новому изделию. 2 февраля 1956 года был произведен первый пуск Р-5М, оснащенной головной частью с ядерным зарядом. Несмотря на всеобщее возбуждение и неизбежное в таких случаях волнение, усугубляемое присутствием высокого начальства, боевой расчет сработал с высоким профессионализмом. Ракета благополучно стартовала и достигла района цели. Надежно сработала автоматика подрыва ядерного заряда. К началу лета 1956 года программа летных испытаний ракеты Р-5М была завершена, и 21 июля постановлением правительства она была принята на вооружение инженерных бригад РВГК, где состояла до 1961 года.