Размышляя об искусственном интеллекте и искусственном сознании, часто делают заключение о том, что есть лишь два типа систем обработки информации: искусственные и естественные. Это не так. В контексте философского жаргона, концептуальное различие между естественными и искусственными системами не является ни исчерпывающим, ни эксклюзивным: то есть, могут быть интеллектуальные и/или сознательные системы, которые нельзя отнести ни к одной из этих категорий. Что касается другого старомодного различения на программное и аппаратное обеспечение, то у нас уже имеются системы, которые используют биологический аппарат, которым можно управлять при помощи искусственной (то есть, созданной человеком) программы; также, у нас имеются искусственные аппараты, управляемые программами, которые возникли в ходе эволюции.
Гибридные биороботы являются примером первой категории. Гибридная робототехника является новой дисциплиной, которая использует естественно возникшее аппаратное обеспечение, что избавляет от необходимости создавать заново нечто, что оптимизировалось природой на протяжении миллионов лет. По мере того, как мы достигаем ограничений искусственных компьютерных чипов, мы всё чаще будем прибегать к использованию органических, генетически разработанных аппаратов для роботов и искусственных агентов, которых мы будем создавать.
Примером второй категории является использование программ, записанных в нейронные сети для управления искусственным аппаратным обеспечением. Некоторые из таких попыток даже используют нейронные сети сами по себе; к примеру, кибернетики из Университета Ридинга (Великобритания) управляют роботом посредством сети из около трёхсот тысяч крысиных нейронов. Другие примеры представляют собой классические искусственные нейронные сети для усвоения языка или те, которые используются исследователями сознания вроде Axel Cleeremans из Cognitive Science Research Unit в Universite Libre de Bruxelles в Бельгии, для моделирования метарепрезентационной структуры сознания и того, что он называет «вычислительными коррелятами» оного.2 Последние два — биоморфические и лишь наполовину искусственные системы обработки информации, так, как их базовая функциональная архитектура заимствована у природы и использует паттерны обработки, которые развились в ходе биологической эволюции. Они порождают состояния «более высокого порядка», которые, однако, всецело относятся к подличностному.
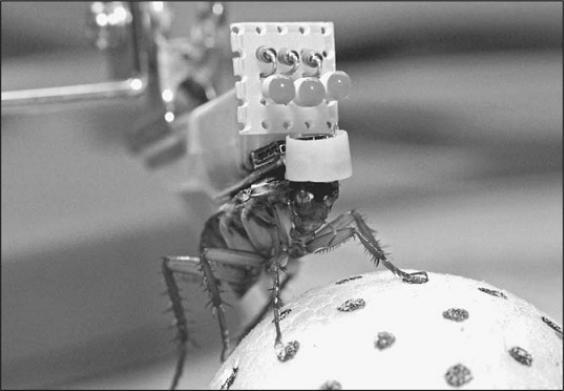
Рисунок 16: РобоТаракан. Управление движениями таракана при помощи хирургически имплантированного микророботического рюкзака. «Рюкзак» таракана содержит ресивер, который преобразует сигналы от удалённого управления в электрические стимулы, которые прикладываются к основе антенн таракана. Это позволяет оператору останавливать таракана, направлять вперёд, разворачивать назад, поворачивать вправо и влево по команде.
Возможно, скоро у нас появится функционалистская теория сознания, но это не значит, что мы также будем способны применить функции, описываемые этой теорией, на системах с небиологическим носителем. Искусственное сознание — это не сколько теоретическая проблема в контексте философии ума, сколько технологический вызов; дъявол в деталях. Реальная проблема лежит в разработке не-нейронного типа аппаратного обеспечения с соответствующими мощностями: Даже простейшая, минимальная форма «синтетической феноменологии» может оказаться труднодостижимой, причём, по чисто техническим причинам.
Первые само-моделирующие машины уже появились. Исследователи в области искусственной жизни уже давно начали симулировать процесс эволюции, но сегодня мы имеем новую академическую дисциплину, которая называется «эволюционная робототехника». Josh Bongard с кафедры компьютерных наук Университета Вермонта, вместе со своими коллегами Виктором Зыковым и Hod Lipson, создали искусственную морскую звезду, которая постепенно развивает явную внутреннюю себя-модель.3 Их четырехногая машина использует отношение срабатывания-чувствования для формирования мнения, косвенным образом, относительно собственной структуры, после чего использует себя-модель для произведения дальнейшего движения. Когда ей удаляют часть ноги, машина адаптирует себя-модель и производит альтернативные походки — она учится хромать. В отличие пациентов с фантомными конечностями, о которых мы писали в части 4, она может реструктурировать представление о собственном теле в соответствии с потерей конечности; таким образом, по сути, она может учиться. Как заявляют создатели, она может «автономно восстановить собственную топологию, имея некоторое предварительное знание», постоянно оптимизируя параметры получающейся в результате себя-модели. Морская звезда не только синтезирует внутреннюю себя-модель, но также использует её для порождения разумного поведения.

Рисунок 17а: Морская звезда, четырёхногий робот, который ходит, благодаря использованию внутреннего себя-модели, которую он развивает и которую постоянно улучшает. Если он теряет конечность, он может адаптировать внутреннего себя-модель.5
Себя-модели могут быть бессознательными, они могут развиваться и они могут быть созданы в машинах, которые подражают процессу биологической эволюции. В целом, у нас уже есть системы, которые нельзя отнести ни к исключительно природным, ни к исключительно искусственным. Мы будем называть такие системы постбиотическими. Наиболее вероятно, что сознательная самость будет впервые реализована именно в постбиотических Эго Машинах.
Как построить субъекта искусственного сознания и почему мы не должны делать этого
Какие условия должны быть удовлетворены для нашей уверенности в том, что определенная постбиотическая система имеет сознательный опыт? Или, что она также располагает сознательной самостью и истинной, сознательно переживаемой, перспективой от первого лица? Что превращает информационно-процессуальную систему в субъект опыта? Мы можем изящно объединить эти вопросы, задав более простой и провокативный: Чего будет стоить нам построение искусственной Эго Машины?
Если вы обладаете сознанием, это означает, что определенный набор фактов доступен вам. Это все те факты, которые относятся к вашей жизни в едином мире. Поэтому, любая машина, проявляющая сознательный опыт, нуждается в интегрированном и динамическом мире-модели. Я обсуждал этот пункт во второй главе, где я указывал на то, что любая сознательная система нуждается в унифицированном внутреннем представлении о мире и что информация, собранная в это представление, должна быть мгновенно доступна множеству обрабатывающих механизмов. Это феноменологическое озарение настолько просто, что его часто не замечали: Сознательные системы это системы, действующие в соответствии с глобально доступной информацией при помощи единой внутренней модели действительности. В принципе, нам ничто не мешает наделить машину таким интегрированным внутренним образом мира, который, к тому же, сможет непрерывно обновляться.
Другой урок из начала этой книги заключался в том, что в самой своей сути, сознание это присутствие мира. Для того, чтобы искусственная Эго Машина увидела мир, ей требуются следующие два функциональные свойства. Первое состоит в организации своего внутреннего потока информации через образование психологического момента, переживаемого Сейчас. Этот механизм выбирает индивидуальные события из непрерывного потока физического мира и изображает их в качестве современных (даже в том случае, если они таковыми не являются), упорядоченные и успешно протекающие в одном направлении, будто бы мысленно протянутая нить с жемчужинами. Некоторые из этих жемчужин формируют большие гештальты, которые можно представить как опытное содержимое отдельного момента, переживаемого Сейчас. Второе свойство должно гарантировать, что эти внутренние структуры не смогут быть распознаны искусственной сознательной системой в качестве внутренних сконструированных образов. Они должны быть прозрачными. На этом этапе, искусственная система встретится с миром. Активация унифицированной, когерентной модели действительности, разворачивающейся в рамках внутреннего окна настоящего, которая не может быть распознана в качестве модели, представляет собой явление мира. В общем, явление мира это и есть сознание.