В 1969 г. “Москва" два раза совершала походы в Средиземное море, постепенно расширяя границы поиска ПЛ (до 120 км от корабля) и совершенствуя тактику. В каждом походе на борту было не менее двух “ДЦ”, осуществлявших контроль воздушной обстановки и загоризонтное наблюдение за вертолетами поисковой группы. Основные методы поиска оставались неизменными: днем - с помощью ГАС и РГБ, ночью - исключительно РГБ из-за нежелания подвергать опасности летный состав.
Понять, как проходила противолодочная операция, будет проще, если рассмотреть действия экипажа Ка-25 в типовом боевом вылете. ...Крейсер ПЛО получил сообщение, что в квадрате N вероятно присутствие подводной лодки противника. Экипажу Ка-25ПЛ приказано вылететь на ее обнаружение. На нижней палубе вертолет оснащают в поисковом варианте: в бомбоотсек подвешивают 1-2 контейнера с гидроакустическими буями, на передние бортовые держатели - ориентирно-маркерные бомбы или дополнительные топливные баки в случае большой дальности, на задние - кассеты с радиолокационными буями. Специальным лифтом его поднимают на полетную палубу, тросом подтягивают к стартовой площадке, покрытой крупноячеистой сетью (для предотвращения соскальзывания). Экипаж занимает места в кабине, и машина уходит на задание. Довернув на нужный азимут, летчик может слегка расслабиться - машину поведет автопилот.
Ка-25К на летных испытаниях. Май 1967 г.
Ка-25 на борту судна "Восток-3". Программа "Эллипс", Индийский океан, 21 сентября 1968 г.
...Квадрат N. Поворот на курс, перпендикулярный предполагаемому движению ПЛ. Штурман открывает створки бомболюка: через равные интервалы (в несколько км) из контейнера сбрасываются РГБ “Чинара”. После приводнения буй около двух минут самоподготавливается к работе: выпускает антенну, опускает на глубину до 100 м гидрофон, водоналивная (“замачиваемая") батарея начинает давать ток. Затем система самоконтроля непрерывно в течение пяти минут сообщает на вертолет о готовности, и РГБ переходит в дежурный режим. Противолодочный барьер установлен: теперь, если подводный корабль будет проходить мимо любого из буев, гидрофон услышит его шумы и передаст на вертолет. Если первый барьер лодку не обнаружит, ставится второй, третий и далее. При приеме от любого из РГБ сигнала о фиксации характерного спектра шумов ПЛ вертолет выходит на его позицию, откуда устанавливаются еще 1-2 серии: РГБ, расположенные поперек предполагаемого направления движения лодки, позволяют определить ее курс, а вдоль - следить за ней.
Как для обнаружения, так и для слежения существуют и две иных возможности. Первая - использование ГАС. Определив точку начала слежения (или поиска), штурман сообщает летчику о начале режима зависания и по направляющим на полу вместе с креслом переезжает на свое другое рабочее место в грузовой кабине. Вертолет зависает на высоте 30-50 м. Летчик нажимает на кнопку “Поиск" на ручке управления, и с этого момента автопилот будет очень стабильно поддерживать заданную высоту. Щелчок тумблера - и барабан лебедки начинает отматывать кабель-трос. Из шахты в задней части фюзеляжа выходит заглубляемая часть ГАС (“Прибор 10") и опускается в воду. Теперь штурман (он же- оператор) будет с его помощью слушать лодку.
ПЛ уже в конце 60-х гг. стали очень тихими, спектр их шумов конструкторы стремились приблизить к шуму моря. Выделить их просто на слух нелегко, поэтому полученный от акустической антенны сигнал дублируется: кроме изменения тональности звука в наушниках, наличие лодки подтвердит и всплеск на экране электронного индикатора. Если лодка обнаружена, поисковый вертолет продолжает слежение, перелетая с места на место, зависая и опуская ГАС. В случае принятия решения на уничтожение вызываются вертолеты в ударном варианте.
Возможен и второй вариант - поиск с помощью магнитометров, т.е. устройств, фиксирующих наличие под водой больших масс ферромагнитных материалов (корпус ПЛ). Но эти приборы имеют меньшую дальность и вероятность обнаружения, поэтому используются реже и только при групповом поиске.
После прибытия ударного вертолета (тот же Ка-25ПЛ, но с противолодочной торпедой или глубинными бомбами в бомбоотсеке) поисковый, как мавр, сделавший дело, может уходить. Но прежде необходимо “передать эстафету", т.е. указать местонахождение подлодки. Сделать это можно по-разному: днем - ориентирномаркерной бомбой (в месте падения образуется хорошо заметное флуоресцирующее светло- зеленое пятно), в темноте - ночной ОМАБ (дает длительно горящий факел пламени). В плохих же погодных условиях или для большей надежности сбрасывают радиолокационный буй: он является приводным маяком, давая сигнал о себе на экран РЛС.
Экипаж ударного вертолета, как правило, сразу оружие не применяет. Вначале уточняет местонахождение лодки, опустив “Прибор 10” и включив его в активный, излучающий режим “ЭП” (эхопеленгования), т.е. в режим гидролокатора. В этом случае следовало поспешить: если раньше лодка и не подозревала о слежении, то теперь дробь эхо-сигналов по корпусу предупреждала экипаж о серьезных намерениях сил ПЛО. К сожалению, как уже отмечалось, поисково-прицельная система Ка-25ПЛ была не автоматической, а лишь автоматизированной. Поэтому от момента получения данных о местонахождении цели до выхода в атаку уходило 5-6 минут, и если лодка успевала выполнить маневр уклонения “в режиме ошпаренного пуделя", то атака могла сорваться, а при активных усилиях (пуск ложных целей, помехи) субмарина имела шансы и вовсе “слинять”.
Подъем “ДБ” на полетную палубу крейсера “Москва”. Вертолет имеет серийный номер 0506 (6-я машина 5-й серии)
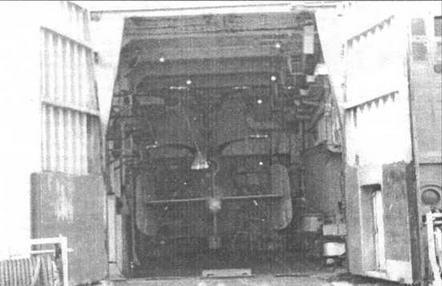
“ДЦ” в ангаре крейсера “Москва”
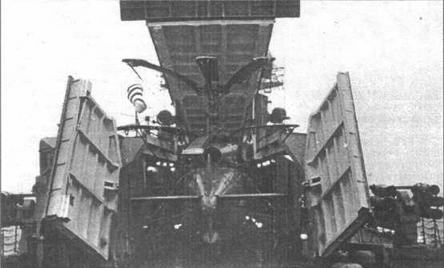
“ДБ” первых серий на корабле одиночного базирования. Тесный ангар напоминал “хрущевку”, и для “вноса тела” необходимо было поднимать крышу
Для более надежного поиска вертолеты применялись вначале парами, затем - четверками, но эффективность решения задач обнаружения и уничтожения на Ка-25ПЛ так и не удалось довести до нужного уровня. Итоги проведенных в марте-апреле 1970 г. крупнейших в ВМФ СССР учений “Океан" свидетельствовали, что для борьбы с новейшими ПЛАРБ требовался вертолет с большей дальностью полета и более совершенной аппаратурой обнаружения. Хотя для черноморских экипажей эти маневры и не были столь уж неудачными. 28 Ка-25 с “Москвы” и “Ленинграда” налетали в те дни более 400 ч в Средиземном море, обнаружили одну ПЛАРБ, одну дизель-электрическую ПЛ и отслеживали их в течение суток.
Ка-25 продолжал исправно служить. В 1971 г. “Ленинград” дважды ходил на боевую службу[* “...Задача боевой службы: контроль за деятельностью сил вероятного противника с целью предотвращения внезапного нападения “ (Из “Руководства по боевой службе ВМФ").] в Средиземное море. В 1972 г. поход был более длительным: из Средиземного моря - в Атлантику, затем в Баренцево море. В каждом плавании отрабатывались поисковые операции и обнаруживались отдельные ПЛ, но эпизодический характер самих походов говорил скорее об изучении перспектив ПЛО, чем о систематической и целенаправленной борьбе с ПЛАРБ и ПЛ.
С 1970 по 1974 гг. “Москва" и “Ленинград” неоднократно “демонстрировали присутствие” на Ближнем Востоке, оказывая моральную (и разведывательную) помощь арабам. В августе 1974 г. экипажу “Ленинграда” довелось принять участие в реальной боевой операции - разминировании Суэцкого залива.
А началось все 30 апреля 1974 г., когда С.В.Михеева, ставшего после смерти Н.И.Камова главным конструктором ОКБ, неожиданно вызвали в Главный штаб ВМФ и сообщили, что между СССР и Египтом подписано соглашение о помощи в разминировании Суэцкого залива. Военные поставили задачу: к 9 мая шесть вертолетов “ДБШЗ" должны быть на палубах кораблей, идущих на разминирование.