Рис. 84. Модель простейшего робота
Рис. 85. Ноги робота
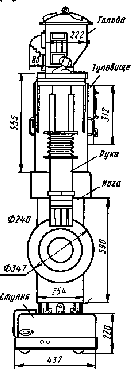
Рис. 86. Чертёж робота
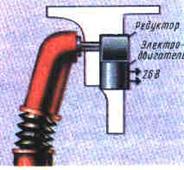
Рис. 87. Механизм подъёма руки
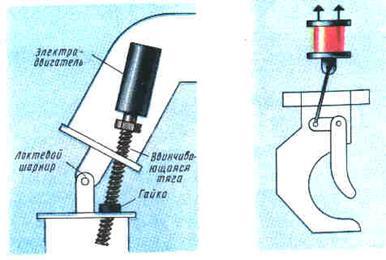
Как работает механизм подъёма рук робота, поясняет рис. 87. На рис. 88 показана конструкция локтевого сустава модели. Когда робот берет в руку предметы, он прижимает их большим пальцем руки, поворачивающимся с помощью электромагнита (рис. 89)
Рис. 88. Локтевой сустав робота. Рис. 89. Рука робота
Голову робота поворачивают также электродвигатель с редуктором. Всюду в модели установлены конечные выключатели, определяющие пределы перемещения ног, рук и головы.
Конструирование роботов – манипуляторов
Многие наши школьники уже самостоятельно конструируют промышленных роботов – разумеется, в кружках под руководством специалистов. Так, школьники из Подмосковья (г. Электросталь) не так давно изготовили механическую руку (рис. 90). Рука робота укреплена на самодвижущейся тележке. Управляют рукой и тележкой с пульта дистанционно. Устройство предназначено для работы в токсичной среде.
Рис. 90. Механическая рука
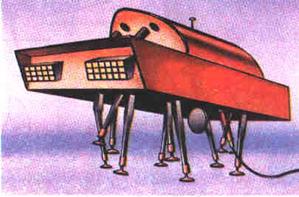
Рис. 91. Космический шагоход «Марс-1»
Ребятами созданы многочисленные модели стопоходящих роботов, оснащённых манипуляторами. На рис. 91 показана действующая модель космического шагохода «Марс-1», разработанного учащимися Одессы.
Если вы займётесь конструированием моделей манипуляторов, то вам помогут некоторые типовые конструкторские решения индустриальной робототехники, с которыми мы сейчас познакомимся.
Системы привода современных манипуляторов. Современные системы привода промышленных манипуляторов примерно в 20% случаев пневматические, в 50% – гидравлические и в 30% – электрические. Гидравлический привод целесообразен в манипуляторах, оперирующих большими массами, пневматический, как более скоростной, – в схватывающих устройствах. Электрический привод удобнее использовать в обучающихся роботах, выполняющих различные рабочие операции (рис. 92). Он, как правило, состоит из тиристорного или транзисторного устройства питания
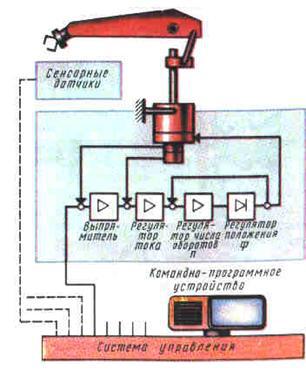
Рис. 92 Электрическии привод робота
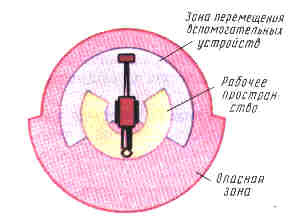
Рис. 93 Зоны действия манипулятора
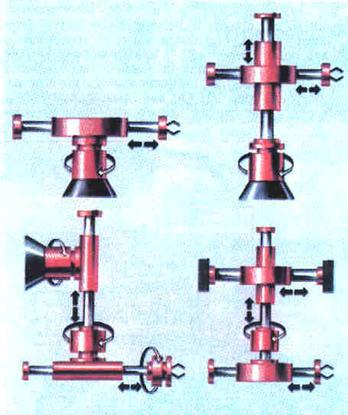
Рис. 94 Варианты установки манипулятора
‹-› Устройство поступательного движения ‹поворотное устройство
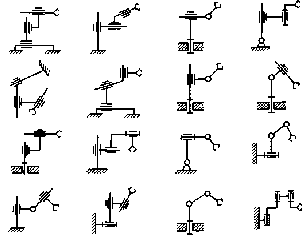
Рис. 95 Примеры кинематических схем манипуляторов электропривода и системы контроля за траекторией движения манипулятора. В систему контроля входят устройства регулирования тока электропривода, регуляторы частоты вращения и положения манипулятора. В отдельном шкафу размещено командно – программное устройство и телевизионный экран системы контроля и управления.
Рабочие зоны манипулятора и зоны опасности. Зоны действия манипулятора (рис. 93) – это рабочее пространство, зона перемещения вспомогательных устройств манипулятора (его направляющих, противовесов и т.д.) и зона опасности. При налаживании манипулятора определяют его запрограммированное рабочее пространство, размеры которого меняются от задачи к задаче.
Структура манипулятора в зависимости от его размещения на рабочем месте. Из рис. 94 видны возможные варианты установки манипулятора и характер движения его основных элементов в различных условиях. Стрелки на рисунке показывают виды движения устройств манипулятора.
На рис. 95 приведены примеры кинематических схем различных вариантов манипуляторов.
Рабочие органы промышленных роботов
Рабочие органы промышленных роботов предназначены для захвата, удержания изделия и перемещения его при выполнении технологических операций. В соответствии с назначением все рабочие органы можно разделить на две группы: рабочие органы типа схвата и технологические рабочие органы. К первой группе относят механические с жёсткими или пружинными губками, вакуумные, электромагнитные и струйные схваты, а ко второй – клещи для контактной точечной сварки, горелку для электродуговой сварки, распылитель для окраски, специальные инструменты.
Конструируя механические схваты промышленных роботов, приходится учитывать конкретный тип детали или группы деталей, их форму, материалы и условия технологического процесса. Важные критерии при этом – необходимая точность удержания детали и допустимо усилие на губках. Перечисленные соображения привели к тому, что в настоящее время существует много различных схватов, отличающихся кинематической схемой, формой губок и конструкцией. Как правило, механический схват приводит в движение пневматический цилиндр, расположенный в центре кисти робота. Управляет таким цилиндром блок управления роботом, а воздух поступает от общей магистрали. Конструкции механических схватов могут иметь разные размеры, расположение и форму губок, тип привода и т.д. Для удержания легко деформируемых изделий используют эластичные губки, в том числе и надувные.
Для удержания таких хрупких предметов, как, например, кинескоп телевизора, применяют вакуумные схваты.
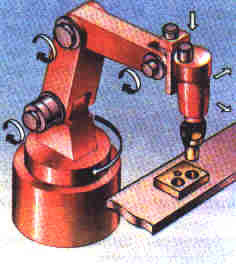
Рис. 96. Общий вид типового индустриального сборочного робота
На рис. 96 изображён общий вид типового индустриального сборочного робота. Грубые движения робота выполняют мощные системы привода, подводящие его схват с устройствами точной ориентации к рабочему месту. После этого в действие вступают устройства точной ориентации схвата, находящиеся на его головке.
Заключение.
Заводы – роботы будущего
Возможно на предприятиях будущего у проходной повесят табличку: «Людям вход строго воспрещён!» Сегодня мы нередко сталкиваемся с ситуацией, когда человек в силу своих ограниченных физических и психических качеств становится тормозом на пути развития производства, вынуждает оплачивать своё присутствие у печи или в цехе расходами на создание приемлемых условий труда. Роботизация снимает эти ограничения и тем самым открывает пути к качественным преобразованиям в сфере производства.
В цехах безлюдного завода можно установить станки, не нуждающиеся в эстетическом оформлении. Это почти на треть сократит себестоимость станков. Понадобится значительно меньше металла, пластмасс, других материалов. Оператор, удалённый от станка, будет находиться в комфортабельных условиях, станки тогда можно располагать прямо на полу, а не поднимать их станину на уровень рук человека, на что сейчас идёт немало металла.