Рис. 2.11.
Предположим, что мы измеряем спиновое состояние частицы, попавшей в наш детектор «здесь», а вторая частица за это время улетела очень далеко, и точка «там» находится где-то на Луне! Пусть далее мой коллега на Луне включил детектор и измерил проекцию спина в направлении вверх/вниз. Если спин этой частицы направлен вниз, то это означает, что у первой частицы он был направлен вверх, поскольку обычно предполагается, что вектор состояний частицы представляет собой смесь равновероятных состояний (спин-вверх и спин-вниз).
Для описания систем с такими смешанными состояниями в квантовой механике применяется стандартный метод, основанный на использовании так называемой матрицы плотности. В нашем случае матрица плотности, которую должен ввести первый наблюдатель (его можно условно назвать «я/здесь»), имеет вид, показанный на рис. 2.12. Множители ½ в правой части относятся к вероятности обнаружить, что спин «здесь» направлен соответственно вверх и вниз. При этом речь идет о совершенно обычных, классических вероятностях, отражающих степень нашего незнания относительно реального состояния изучаемой частицы. Эти вероятности представляют собой, как обычно, просто действительные числа (лежащие в интервале между 0 и 1), так что комбинация на рис. 2.12 представляет собой стандартную сумму вероятностей с заданным весом, а не сложную квантовую суперпозицию с комплексными коэффициентами. Отметим еще, что величины типа | < и < | (с угловыми скобками, направленными вправо и влево), которые умножаются на соответствующие вероятности (равные ½), были введены Дираком и названы им кет-вектором и бра-вектором, соответственно. В общем случае бра-вектор представляет собой комплексно сопряженный кет-вектор.
Рис. 2.12.
Я не буду рассказывать даже в самых общих чертах о серьезнейшем математическом аппарате теории матриц плотности. Для нашего рассмотрения достаточно знать, что матрица плотности содержит всю информацию, необходимую для расчета вероятностей результатов измерений, производимых над одной частью квантовой системы, в тех случаях, когда информация о другой части квантового состояния недоступна. Например, в нашем случае полное квантовое состояние относится к паре частиц (запутанное состояние), причем предполагается, что при измерении «здесь» мы не можем ничего знать о результатах измерения «там» (на Луне) состояния частицы-партнера.
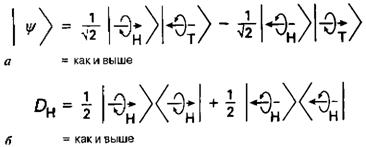
Я позволю себе немного изменить рассматриваемую ситуацию и предположу дополнительно, что мой коллега на Луне при измерении спина выбрал направление влево/вправо, а не вверх/вниз, как раньше. В этом случае запись состояний примет вид, показанный на рис. 2.13. В сущности, эта запись совпадает с записью рис. 2.11 (та же алгебраическая схема, основанная на геометрии рис. 2.4), однако в ней использованы другие обозначения состояний. В момент измерения мы еще не знаем результатов, полученных коллегой на Луне, однако ясно, что он с одинаковой вероятностью может получить для спина левое направление (в этом случае я должен получить правое направление) или правое (в этом случае я получаю левое). Матрица плотности DH, приведенная на рис. 2.13, при этом будет полностью совпадать с введенной ранее матрицей рис. 2.12. Предлагаемые рассуждения пока кажутся безупречными, поскольку представляется очевидным, что измерения, проводимые коллегой на Луне, не должны изменять вероятностей, получаемых при измерениях на Земле (в противном случае коллега мог бы передавать мне сообщения со скоростью больше скорости света; для этого он мог бы кодировать свои сообщения просто выбором направления регистрации).
Рис. 2.13.
Алгебраически легко проверить, что матрицы плотности действительно одинаковы. Не беда, если вы не знаете, о каких алгебраических приемах я говорю. Вам следует лишь помнить, что матрица плотности — наиболее совершенный аппарат для описания состояния, о части которого вы ничего не знаете. Используемые в этой матрице вероятности имеют обычный смысл, но применяются для квантовомеханического описания, при котором в неявной форме учитываются квантовые вероятности. Короче говоря, если вы ничего не знаете о происходящем «там», матрица плотности даст наилучшее описание состояния «здесь».
Однако из сказанного очень трудно заключить, что матрица плотности описывает реальность. Дело в том, что я позднее могу (или не могу) получить с Луны послание, где будет сказано о том, что мой коллега осуществил измерения состояния второй частицы и получил такие-то и такие-то результаты. Лишь после этого я буду знать о реальном состоянии моей частицы. Матрица плотности не содержит всей информации о моей частице, и я должен определять актуальное состояние связанной пары частиц. Следовательно, матрицу плотности следует рассматривать лишь в качестве средства вспомогательного, временного описания, вследствие чего ее и обозначают иногда сокращением FАРР («для всех практических целей»).
Матрицы плотности гораздо чаще применяются для описания ситуаций типа изображенной на рис. 2.14. Их намного сложнее применять для запутанных состояний, при которых что-то доступно нам и «здесь» (например, живой или мертвый кот), а что-то — коллегам «там» (на Луне или за соседним столом, это не принципиально), и лишь сочетание «здесь» и «там» может дать полное описание среды, связанной с многострадальным котом. Именно поэтому я вынужден при построении полного вектора состояний учитывать живого кота (с некоторым окружением) плюс мертвого кота (с другим окружением). Сторонники FАРР-подхода утверждают, что вы никогда не можете иметь полную информацию об окружении и поэтому всегда вынуждены пользоваться не вектором состояний, а матрицей плотности (рис. 2.15). Матрица плотности ведет себя подобно смеси вероятностей различных состояний, вследствие чего сторонники FАРР-подхода могут утверждать, что «для всех практических целей» кот либо мертв, либо жив. Это звучит совсем неплохо именно «для всех практических целей», но не дает нам картины реальности, т.е. не сообщает ничего о том, что могло бы произойти, если бы кто-то (предположим, что такие мудрые люди существуют!) подошел к вам раньше и посоветовал, как извлечь (или, точнее, выделить) информацию из окружения. В каком-то смысле описываемый подход действительно является временным — он полезен до тех пор, пока никто не умеет выделять и получать такую информацию. Однако вы можете применить к ситуации с котом рассуждения, приведенные выше для частицы в ЭПР-эксперименте. Мы уже говорили, что использование проекций спина в направлениях вверх/вниз и влево/вправо является совершенно эквивалентным. В принципе мы можем найти эти «левые» и «правые» состояния, комбинируя состояния «вверх» и «вниз» в соответствии с законами квантовой механики, что должно привести нас к тому же «запутанному» состоянию (показанному на рис. 2.13, а) и к той же самой матрице плотности (рис. 2.13, б).
Рис. 2.14.
Рис. 2.15.
Ситуация с котом и его окружением (я по-прежнему буду рассматривать только случай равных амплитуд w и z) математически описывается точно так же, как эксперимент со спином (выражение «живой кот плюс мертвый кот» играет роль «правого» спина, «живой кот минус мертвый кот» — роль «левого» спина), и мы получаем то же состояние (рис. 2.14 с w = z) и ту же матрицу плотности (рис. 2.15 с w = z). Естественно возникает вопрос, являются ли комбинации слов «живой кот плюс мертвый кот» и «живой кот минус мертвый кот» столь же точными и удобными, как привычные термины «живой кот» и «мертвый кот». Это вовсе не представляется очевидным, однако используемая математика достаточна ясна — матрица плотности для кота не изменяется (рис. 2.16), так что даже знание о характере матрицы не помогает нам выяснить вопрос о его состоянии. Другими словами, матрица плотности не содержит данных о жизни и смерти кота, и мы должны найти их где-то еще.