ax.plot(path[0][1], path[0][0], color='green', marker='o') # Стартовая точка
ax.plot(path[-1][1], path[-1][0], color='blue', marker='o') # Конечная точка
ax.axis('image')
ax.set_xticks([])
ax.set_yticks([])
plt.show()
# Функция для рекурсивного поиска пути в лабиринте с использованием DFS
def dfs(maze, start, end, path=[]):
path = path + [start]
if start == end:
return path
if maze[start[0]][start[1]] == 1:
return None
for direction in [(0, 1), (1, 0), (0, -1), (-1, 0)]:
new_row, new_col = start[0] + direction[0], start[1] + direction[1]
if 0 <= new_row < len(maze) and 0 <= new_col < len(maze[0]):
if (new_row, new_col) not in path:
new_path = dfs(maze, (new_row, new_col), end, path)
if new_path:
return new_path
return None
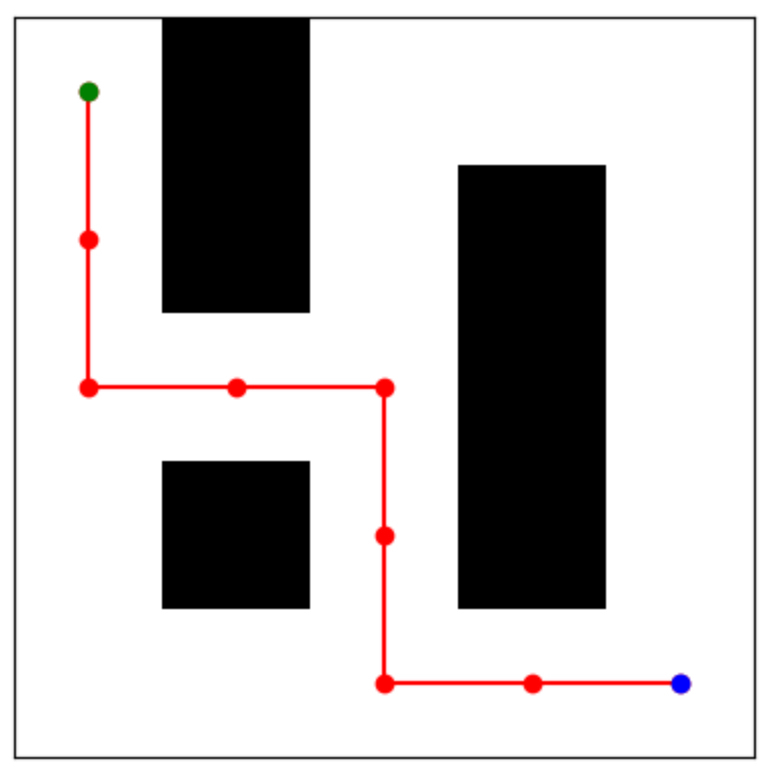
# Пример лабиринта (0 – путь, 1 – преграда)
maze = [
[0, 1, 0, 0, 0],
[0, 1, 0, 1, 0],
[0, 0, 0, 1, 0],
[0, 1, 0, 1, 0],
[0, 0, 0, 0, 0]
]
start = (0, 0)
end = (4, 4)
# Поиск пути в лабиринте
path = dfs(maze, start, end)
# Визуализация результата
visualize_maze(maze, path)
```
Этот код создает лабиринт, используя матрицу, где 0 представляет путь, а 1 – стену. Алгоритм DFS используется для поиска пути от начальной до конечной точки в лабиринте. Результат визуализируется с помощью библиотеки matplotlib, где красным цветом обозначен найденный путь, а зеленым и синим – начальная и конечная точки.
2. Поиск в ширину (BFS):
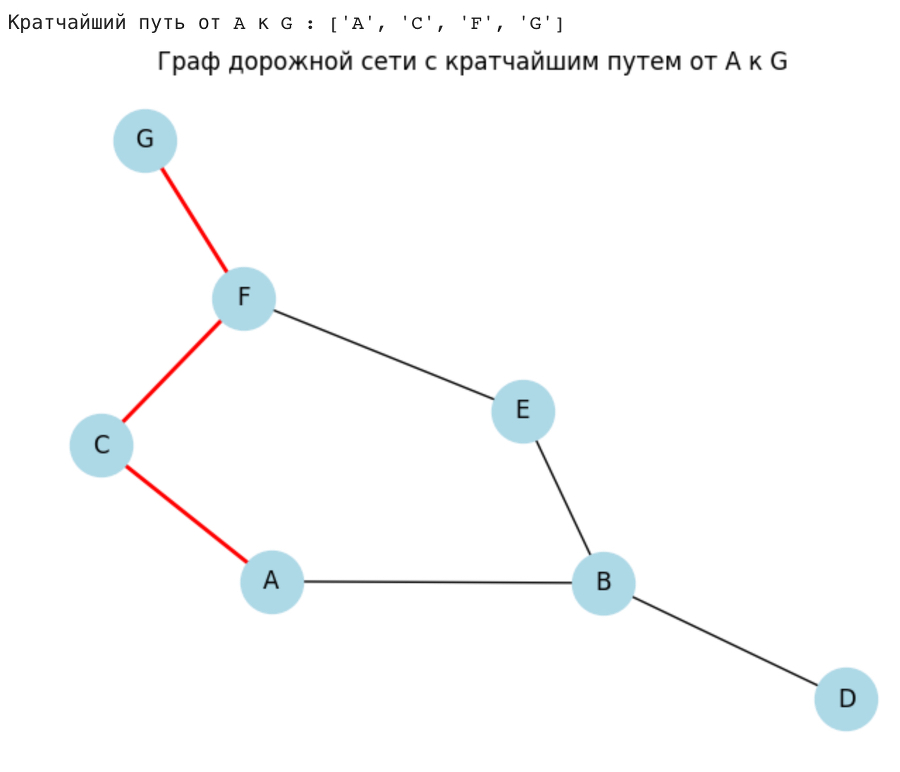
Пример задачи: Найти кратчайший путь от стартовой точки к конечной точке в графе дорожной сети.
Решение: Алгоритм BFS начнет с начальной точки и исследует все смежные вершины, затем все смежные вершины этих вершин и так далее. Когда будет найдена конечная точка, алгоритм вернет кратчайший путь к этой точке, так как он исследует вершины на одном уровне графа, прежде чем переходить к следующему уровню.
Для реализации алгоритма BFS в поиске кратчайшего пути в графе дорожной сети мы также можем использовать язык Python. Для визуализации результата кратчайшего пути в графе дорожной сети мы можем использовать библиотеку `networkx` для создания и отображения графа. Рассмотрим пример кода:
```python
import networkx as nx
import matplotlib.pyplot as plt
from collections import deque
# Функция для поиска кратчайшего пути методом BFS
def bfs(graph, start, end):
visited = set()
queue = deque([(start, [start])]) # Очередь для обхода графа
while queue:
current, path = queue.popleft()
if current == end:
return path
if current not in visited:
visited.add(current)
for neighbor in graph[current]:
if neighbor not in visited:
queue.append((neighbor, path + [neighbor]))
return None
# Пример графа дорожной сети (представлен в виде словаря смежности)
road_network = {
'A': ['B', 'C'],
'B': ['A', 'D', 'E'],
'C': ['A', 'F'],
'D': ['B'],
'E': ['B', 'F'],
'F': ['C', 'E', 'G'],
'G': ['F']
}
start = 'A'
end = 'G'
# Поиск кратчайшего пути в графе дорожной сети
shortest_path = bfs(road_network, start, end)
print("Кратчайший путь от", start, "к", end, ":", shortest_path)
# Создание графа и добавление вершин
G = nx.Graph()
for node in road_network:
G.add_node(node)
# Добавление ребер между вершинами
for node, neighbors in road_network.items():
for neighbor in neighbors:
G.add_edge(node, neighbor)
# Отображение графа
pos = nx.spring_layout(G) # Положение вершин на графе
nx.draw(G, pos, with_labels=True, node_color='lightblue', node_size=1000)
# Выделение кратчайшего пути
shortest_path_edges = [(shortest_path[i], shortest_path[i + 1]) for i in range(len(shortest_path) – 1)]
nx.draw_networkx_edges(G, pos, edgelist=shortest_path_edges, width=2, edge_color='red')
plt.title('Граф дорожной сети с кратчайшим путем от {} к {}'.format(start, end))
plt.show()
```
Этот код создает граф дорожной сети на основе словаря смежности, а затем использует алгоритм BFS для поиска кратчайшего пути от начальной до конечной точки. Результат отображается с помощью библиотеки `matplotlib`. Визуализируется весь граф, а кратчайший путь отображается красным цветом.
Эти примеры демонстрируют, как каждый из методов поиска может быть использован для решения различных задач. DFS подходит для задач, где важно найти любой возможный путь, в то время как BFS используется, когда необходимо найти кратчайший путь или оптимальное решение.
Оба этих метода имеют свои преимущества и недостатки, и выбор конкретного метода зависит от характеристик задачи и требуемых критериев оптимальности. Кроме того, существуют и другие методы поиска, такие как алгоритмы A* и Dijkstra, которые также находят широкое применение в различных областях искусственного интеллекта и информатики.
Оптимизация
Оптимизационные методы в искусственном интеллекте играют ключевую роль в нахождении наилучших решений для сложных задач с определенными ограничениями или целями. Эти методы могут быть применены как к задачам однокритериальной оптимизации, где требуется найти оптимальное решение для одного критерия, так и к многокритериальной оптимизации, где необходимо учитывать несколько конфликтующих целей или ограничений одновременно.
Генетические алгоритмы (ГА) представляют собой мощный класс оптимизационных методов, вдохновленных принципами естественного отбора и генетики. Они являются итеративными алгоритмами, которые эмулируют эволюцию популяции, где каждый кандидат представляет потенциальное решение задачи. На каждой итерации алгоритма создается новое поколение кандидатов путем применения операторов мутации, скрещивания и отбора к родительской популяции.
В начале работы ГА создает случайную популяцию кандидатов, которая представляет собой начальные решения задачи. Затем происходит итеративный процесс, на каждом этапе которого осуществляется оценка приспособленности каждого кандидата в соответствии с целевой функцией. Кандидаты, которые лучше соответствуют поставленным критериям, имеют больший шанс выживания и передачи своих генетических характеристик следующему поколению.
Оператор мутации случайным образом изменяет генетическое представление кандидата, что приводит к разнообразию в популяции и предотвращает застревание в локальных оптимумах. Скрещивание позволяет создавать новых кандидатов путем комбинации генетической информации от двух родителей, что позволяет наследовать лучшие характеристики обоих. Оператор отбора определяет, какие кандидаты будут переходить в следующее поколение на основе их приспособленности, при этом более приспособленные кандидаты имеют больший шанс быть выбранными.
Этот процесс продолжается до достижения условия останова, такого как достижение максимального количества итераций или достижение желаемого уровня приспособленности в популяции. Генетические алгоритмы широко применяются в различных областях, таких как оптимизация функций, настройка параметров моделей, решение задач комбинаторной оптимизации и многие другие.
Допустим, у нас есть задача оптимизации раскроя материала. Для простоты представим, что у нас есть прямоугольный лист материала определенного размера, и нам необходимо распилить его на прямоугольные заготовки определенных размеров таким образом, чтобы использовать материал максимально эффективно и минимизировать отходы.
Для решения этой задачи мы можем применить генетический алгоритм. Каждый кандидат в популяции представляет собой набор прямоугольных заготовок, расположенных на листе материала. Мы можем использовать операторы мутации и скрещивания для создания новых комбинаций заготовок, а также оператор отбора для выбора лучших решений.