class CarPlane
{
LONG m_cRef;
CarPlane(void) : m_cRef(0) {}
public:
// Main IUnknown methods
// Главные методы IUnknown
STDMETHODIMP QueryInterface(REFIID, void**);
STDMETHODIMP_(ULONG) AddRef(void);
STDMETHODIMP_(ULONG) Release(void);
private:
// define nested class that implements ICar
// определяем вложенный класс, реализующий
ICar struct XCar : public ICar
{
// get back pointer to main object
// получаем обратный указатель на главный объект
inline CarPlane* This();
STDMETHODIMP QueryInterface(REFIID, void**);
STDMETHODIMP_(ULONG) AddRef(void);
STDMETHODIMP_(ULONG) Release(void);
STDMETHODIMP GetMaxSpeed(long *pval);
STDMETHODIMP Brake(void);
};
// define nested class that implements IPlane
// определяем вложенный класс, реализующий IPlane
struct XPlane : public IPlane {
// Get back pointer to main object
// получаем обратный указатель на главный объект
inline CarPlane* This();
STDMETHODIMP QueryInterface(REFIID, void**);
STDMETHODIMP_(ULONG) AddRef(void);
STDMETHODIMP_(ULONG) Release(void);
STDMETHODIMP GetMaxSpeed(long *pval);
STDMETHODIMP TakeOff(void);
};
// declare instances of nested classes
// объявляем экземпляры вложенных классов
XCar m_xCar;
XPlane m_xPlane;
};
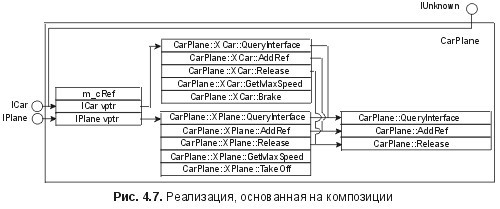
Использование вложенных классов не является обязательным, но оно подчеркивает, что эти подчиненные классы не имеют смысла вне контекста класса CarPlane. Рисунок 4.7 показывает двоичное размещение этого класса и размещения соответствующих vtbl .
Отметим, что имеется два определения вложенного класса, по одному для каждого реализованного им интерфейса. Это позволяет разработчику объекта обеспечить две различных реализации GetMaxSpeed:
STDMETHODIMP CarPlane::XCar::GetMaxSpeed(long *pn) {
// set *pn to max speed for cars
// устанавливаем *pn для максимальной скорости автомобилей
}
STDMETHODIMP CarPlane::XPlane::GetMaxSpeed(long *pn) {
// set *pn to max speed for planes
// устанавливаем *pn для максимальной скорости самолетов
}
Тот факт, что две реализации GetMaxSpeed встречаются в различных определениях вложенных классов, позволяет определить метод дважды и к тому же гарантирует то, что таблицы vtbl, соответствующие ICar и IPlane, будут иметь различные элементы для GetMaxSpeed.
Необходимо также отметить, что хотя класс CarPlane, находящийся на верхнем уровне, реализует методы IUnknown, он не наследует никакому производному от IUnknown классу. Вместо этого объекты CarPlane имеют элементы данных, которые наследуют интерфейсам СОМ. Это значит, что вместо того, чтобы использовать static_cast для вхождения в объект и нахождения определенного указателя vptr, реализация QueryInterface в CarPlane должна возвратить указатель на тот элемент данных, который реализует запрашиваемый интерфейс:
STDMETHODIMP CarPlane::QueryInterface(REFIID riid, void **ppv)
{
if (riid == IID_IUnknown) *ppv = static_cast<IUnknown*>(&m_xCar);
else if (riid == IID_IVehicle) *ppv = static_cast<IVehicle*> (&m_xCar);
else if (riid == IID_ICar) *ppv = static_cast<ICar*>(&m_xCar);
else if (riid == IID_IPlane) *ppv = static_cast<IPlane*>(&m_xPlane);
else return (*ppv = 0), E_NOINTERFACE;
((IUnknown*)(*ppv))->AddRef();
return S_OK;
}
Для обеспечения идентификации объекта каждый из элементов данных CarPlane должен или воспроизвести этот код в своей собственной реализации QueryInterface, или просто передать управление главной функции QueryInterface в CarPlane. Чтобы осуществить это, необходим механизм перехода к главному объекту со стороны функции-члена составного элемента данных. Определение класса CarPlane::XCar содержит встроенную подпрограмму, которая использует фиксированные смещения для вычисления указателя this главного объекта от указателя this составного элемента данных.
inline CarPlane CarPlane::XCar::This(void)
{
return (CarPlane*)((char*)this
// ptr to composite – указатель на композит – offsetof (CarPlane, m_xCar)); }
inline CarPlane CarPlane::XPlane::This(void)
{
return (CarPlane*)((char*)this
// ptr to composite – указатель на композит
– offsetof(CarPlane, m_xPlane));
}
Такая технология вычисления обратного указателя (back-pointer) компактна и чрезвычайно эффективна, так как не требует явных элементов данных для нахождения главного объекта внутри реализации метода элемента данных. При наличии таких алгоритмов вычисления обратного указателя реализация композитного QueryInterface становится тривиальной:
STDMETHODIMP CarPlane::XCar::QueryInterface(REFIID r, void**p)
{
return This()->QueryInterface(r, p);
}
STDMETHODIMP CarPlane::XPlane::QueryInterface(REFIID r, void**p)
{
return This()->QueryInterface(r, p);
}
Такая же передача this потребуется для AddRef и Release для получения обобщенного представления о времени жизни объекта в случае составных (композитных) элементов данных.
Технология, основанная на использовании композиции для реализации интерфейсов, требует значительно больше кода, чем при простом множественном наследовании. Кроме того, качество генерированного кода, вероятно, не лучше (а возможно, и хуже), чем в случае множественного наследования. Из того факта, что классу CarPlane не понадобилось наследовать ни одному интерфейсу СОМ, следует, что композиция является разумной технологией для внесения СОМ в старые библиотеки классов. Например, MFC (Microsoft Foundation Classes – библиотека базовых классов Microsoft) использует эту технологию. Причиной применения композиции при реализации новых классов является получение отдельных реализации метода, определенного одинаково более чем в одном интерфейсе. К счастью, стандартные интерфейсы, определяемые СОМ, очень редко создают такие конфликты, а те немногие, которые создают, почти всегда преобразуются в семантически эквивалентные функции. Для разрешения коллизий, подобных тем, что произошли в сценарии с GetMaxSpeed , композиция, вероятно, и не требуется, так как в первом приближении для преобразования двойников в уникальные объекты достаточно использования промежуточных классов. Эта методика проста, эффективна и фактически не требует дополнительного кода. Основная причина использования композиции в новом коде заключается в том, что нужно обеспечить подсчет ссылок в каждом интерфейсе.
Иногда желательно разместить ресурсы в объекте на базе уже использующихся интерфейсов. В то же время из использования множественного наследования для реализации интерфейсов СОМ следует, что в каждой таблице vtbl будет использована только одна реализация AddRef и Release. Хотя можно выявить первый запрос на заданный интерфейс и разместить ресурсы по требованию:
STDMETHODIMP QueryInterface(REFIID riid, void **ppv)
{
if (riid == IID_IBoat)
{
// allocate resource the first time through
// размещаем ресурсы при первом проходе