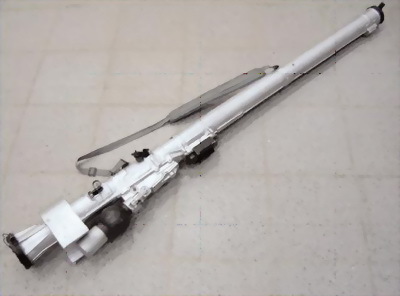
Рис. 9. Пусковой механизм 9П516-1
2. Средства приёма целеуказания и связи
• Переносной электронный планшет 1Л15-1 обеспечивает своевременное оповещение стрелка-зенитчика о месте нахождения и направлении движения воздушных целей (от 1 до 4), индикацию траектории перемещения и принадлежности целей в радиусе 12,5 км. Информацию о целях в виде кодограммы ПЭП получает на встроенный радиоприёмник с батарейного командного пункта (БКП) или командного пункта (КП) зенитного дивизиона.
Рис. 10. ПЭП 1Л15-1
• Радиостанция Р-157 обеспечивает приём оповещения о воздушной обстановке и управление огнём стрелков-зенитчиков. Вместо указанных средств связи могут использоваться переносные аналоги.
Рис. 11. Радиостанция Р-157
3. Средства технического обслуживания
• Подвижный контрольный пункт ПКП 9В866 и контрольно-проверочная аппаратура 9Ф719 служат для проведения технического обслуживания и регламентных работ боевых средств комплекса в полевых условиях и на базах (арсеналах).
Рис. 12. ПКП 9В866 с КПА 9Ф719
4. Учебно-тренировочные средства
• Унифицированный полевой тренажер 9Ф635 предназначен для обучения и комплексных тренировок одного, двух или трёх стрелков-зенитчиков боевой работе и стрельбе по имитированным и реальным воздушным целям в реальной фоновой обстановке с обеспечением объективного контроля действий обучаемых.
• Учебно-тренировочный комплект 9Ф663 предназначен для психофизиологической подготовки одного или двух стрелков-зенитчиков и выполнения учебно-тренировочных задач на месте и в движении. Обеспечивает имитацию пуска ракеты (болванки) на безопасной площадке.
• Учебно-разрезной макет 9К38УР предназначен для изучения устройства боевых средств комплекса.
Рис. 13. Унифицированный полевой тренажёр 9Ф635
Рис. 14. Учебно-тренировочный комплект 9Ф663
Рис. 15. Учебно-разрезной макет 9К38УР
Рис. 16. Габаритно-весовой макет 9К38 ГВМ
• Габаритно-весовой макет 9К38 ГВМ предназначен для обучения и тренировки стрелков-зенитчиков выполнению правил обращения с боевым комплексом, а также выполнению нормативов боевой работы.
• Комплект электрифицированных стендов 2У438 предназначен для изучения устройства боевых средств комплекса, режимов работы и взаимодействия составных частей, а также правил стрельбы и боевой работы.
Принцип работы комплекса
При поступлении команды «К бою!» или самостоятельно после визуального обнаружения цели стрелок-зенитчик занимает стартовую позицию, принимает удобное для стрельбы боевое положение и изготавливается к стрельбе. Определив исходные данные для стрельбы и момент пуска ракеты, он приводит в действие НИП.
После производства накола НИП сжатый газ поступает в фотоприёмник ракеты для охлаждения оптической головки самонаведения. Одновременно срабатывает батарея электропитания, и напряжение с неё поступает в электронные блоки пускового механизма, ракеты и пусковой трубы. Ротор гироскопа ОГС ракеты разгоняется за 5 с до100 об/с и арретируется (электрически стопорится), т. е. происходит согласование оптической оси ОГС ракеты с осью прицела пусковой трубы.
Если стрелок точно сопровождает цель через механический прицел пусковой трубы, а сигнал цели мощнее сигнала фона и помех, то возможно проведение пуска ракеты в одном из двух режимов («Автомат» или «Ручной») путём нажатия на пусковой крючок пускового механизма.
После срабатывания стартового двигателя ЗУР вылетает из пусковой трубы со скоростью до 28 м/с и угловой скоростью вращения до 20 об/с. После удаления ЗУР на безопасное для стрелка-зенитчика расстояние (не менее 5,5 м) срабатывает маршевый двигатель ЗУР, который разгоняет её до скорости 570 м/с и поддерживает эту скорость в полёте. Дальнейшее вращение ракеты на траектории полёта обеспечивается за счёт повёрнутых относительно продольной оси ракеты крыльев и дестабилизаторов.
В момент вылета ЗУР из трубы происходит раскрытие рулей и срабатывание порохового управляющего двигателя, который осуществляет разворот ракеты на начальном участке траектории по командам ОГС. Снимается первая ступень предохранения, а через 1–1,9 с и вторая, после чего боевая часть готова к действию.
В процессе слежения за целью ОГС формирует суммарный командный сигнал, который поступает в рулевой отсек ракеты на рулевые машины и обеспечивает управление ЗУР в полёте.
При попадании ракеты в цель срабатывает взрыватель боевой части, который подрывает боевую часть, а взрывной генератор подрывает остатки топлива двигательной установки.
В случае непопадания ракеты в цель по истечении 14–17 с происходит самоликвидация ЗУР.
Наведение ракеты на цель осуществляется по методу пропорционального сближения, при котором управляющий сигнал пропорционален абсолютной угловой скорости вращения линии визирования ракета-цель. Сущность метода заключается в том, чтобы свести к нулю угловую скорость линии визирования, что обеспечит встречу ракеты с целью в упреждённой точке.
Система управления полётом предназначена для реализации выбранного метода наведения ракеты на цель. В качестве измерителя угловой скорости линии визирования используется одноканальная гироскопическая головка самонаведения. В основу построения бортовой аппаратуры заложен принцип одноканального управления вращающейся ракетой с работающими в релейном режиме рулями, позволяющими, используя вращение ракеты, создавать управляющую силу в любом направлении пространства.
На начальном участке траектории ракета летит не в упрежденную точку, а угловая скорость линии визирования не равна нулю. Оптическая головка самонаведения измеряет эту угловую скорость и пропорционально её величине формирует команду управления, исполняя которую, рули рулевого отсека создают управляющую силу в нужном направлении пространства.
Под действием управляющей силы ракета разворачивается относительно центра масс. Появляющиеся при этом углы атаки и скольжение создают результирующую подъёмную силу, которая изменяет траекторию полёта ракеты таким образом, чтобы свести к нулю угловую скорость линии визирования.
Метод пропорционального сближения обеспечивает попадание ракеты вблизи наиболее теплоконтрастных элементов конструкции цели. При пусках ракет по реактивным самолётам центр попаданий лежит в районе среза сопла двигателя. Однако, конструкция современных самолётов такова, что район среза сопла является малоуязвимой областью для ракеты с боевой частью малой мощности. Для повышения эффективности поражения в ракете предусмотрена схема смещения центра группирования попаданий в направлении полёта самолёта, т. е. в его корпус. Схема смещения вырабатывает дополнительный сигнал, который обеспечивает отклонение ракеты от среза сопла в корпус.