Модели непредсказуемости
Можно показать, что непредсказуемость возникает уже тогда, когда мы имеем дело с системами, которые кажутся очень простыми. Для этого воспользуемся широко известной NK-моделью, предложенной биологом и специалистом по сложным системам Стюартом Кауффманом[4]. Он использовал эту модель для исследования эпистатического взаимодействия (или, выражаясь проще, взаимного влияния) в генных системах, но позже она получила широкое распространение и в других областях, в частности, при исследовании динамики организаций.
Рассмотрим систему из N объектов. Каждый объект может принимать два значения: 0 – если он «выключен» и Fi – если он «включен» (здесь i – номер объекта, а Fi – любое число в интервале от 0 до 1). Через K обозначим количество объектов, которые могут влиять на i-тый объект, очевидно, что максимальное значение K=N-1. Введем понятие «приспособленности» системы, которое определяет ее эффективность при выполнении некой задачи и вычисляется как среднее значение всех входящих в нее объектов:
Будем считать, что целью системы является максимальное увеличение ее приспособленности. Ее начальная конфигурация (т.е. состояние всех объектов – включен или выключен) задается случайным образом. На каждом шаге система может изменять значение только одного из входящих в нее объектов («включать» или «выключать» его). При этом всегда выбирается такое изменение, которое максимально увеличивает приспособленность. Второе ограничение – система может предсказывать и анализировать последствия только планируемого шага, результаты всех последующих действий она оценить не может (так называемый локальный поиск или стратегия инкрементальной адаптации).
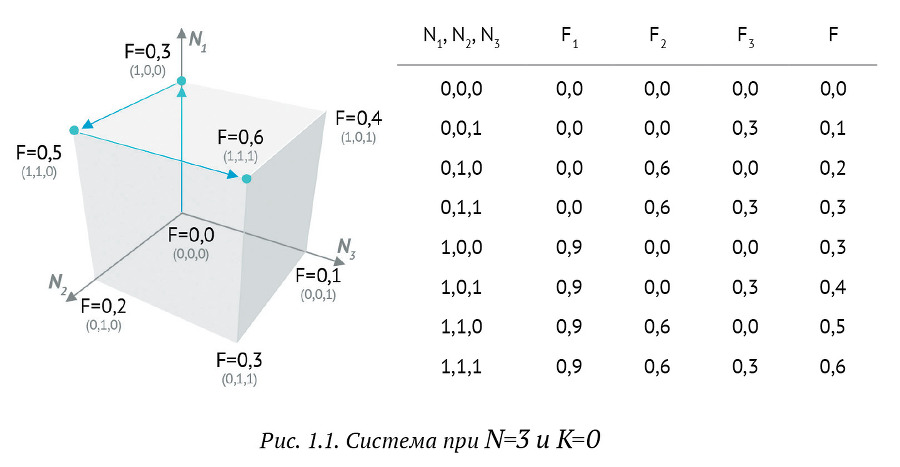
Теперь проведем три эксперимента. Эксперимент первый – пусть наша система состоит из трех объектов, которые не влияют друг на друга, т.е. N=3 и K=0. Различные конфигурации системы, значения отдельных объектов Fi, присвоенные случайно, и приспособленность системы приведены в таблице, размещенной справа на рисунке 1.1. Можно сказать, что значения приспособленности для различных конфигураций системы образуют некий ландшафт, который показан в левой части этого же рисунка. Вершины куба представляют различные конфигурации, им соответствуют различные значения приспособленности. Легко заметить, что ландшафт имеет один глобальный максимум в точке (1,1,1). Из какого бы состояния система не начинала поиск оптимальной конфигурации, данная точка обязательно будет найдена. В качестве примера на рисунке голубыми линиями показана траектория движения из точки (0,0,0).
Теперь проведем второй эксперимент при условии, что все объекты влияют друг на друга, т.е. N=3 и K=2. Предположим, что влияние объектов друг на друга описывается функцией Гаусса. В принципе, на формулы, которые приводятся ниже, можно не обращать внимания. Главное, что следует уяснить, что в данном случае мы знаем, какие законы действуют внутри системы. Теперь новое значение объекта вычисляется по формуле
То есть к собственному значению объекта теперь добавляется значение функции Гаусса
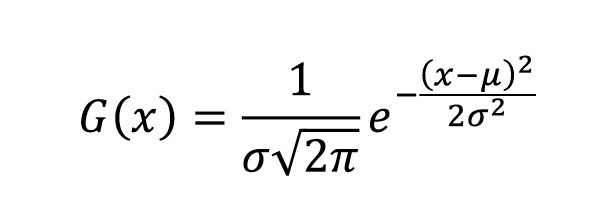
от сумы значений двух других объектов. Эта функция имеет максимум, когда ее аргумент (т.е. сумма значений двух объектов, влияющих на рассматриваемый) равен μ, чем больше значение аргумента отклоняется от μ, тем меньше значение функции. Собственные значения объектов те же, что и в предыдущем случае, вычисленные на их основе значения приспособленности при μ=0,6 и σ=0,3 приведены в таблице на рисунке 1.2.
Теперь мы видим, что ландшафт приспособленности системы имеет несколько локальных максимумов. Система становится чувствительной к начальным условиям – если поиск оптимальной конфигурации начинается из точки (1,0,0), то он завершается в точке (1,1,0), которая не соответствует глобальному максимуму. Поиск из точки (0,0,0) завершается в точке (0,1,1), которая и есть глобальный максимум. Также локальным максимумом является точка (1,0,1), если система уже имеет такую конфигурацию, она завершает свое развитие.
Таким образом, из второго эксперимента следует, что даже относительно простая система, состоящая всего лишь из трех взаимосвязанных элементов, не может гарантированно достичь максимума приспособленности в процессе инкрементальной адаптации.
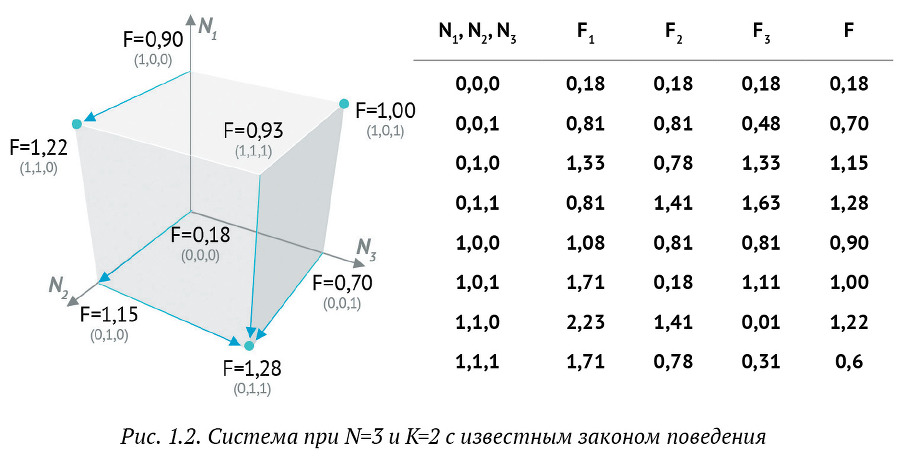
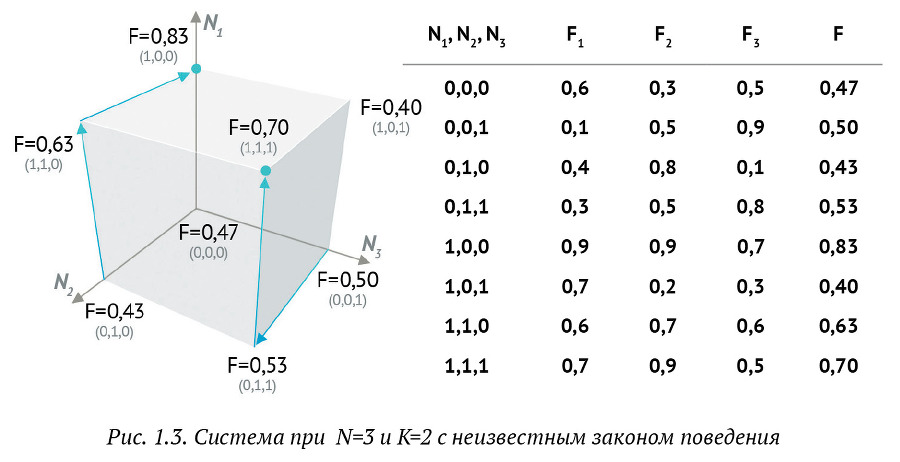
В третьем эксперименте также предположим, что все объекты влияют друг на друга (N=3 и K=2), но мы ничего не знаем о законах, действующих внутри системы. Этот эксперимент можно трактовать также как описание открытой системы, которая взаимодействует с внешней средой, причем внешняя среда непредсказуема и ее влияние значительно искажает связи между объектами (этот случай рассмотрен в упомянутой книге С. Кауффмана). Для моделирования этой ситуации присвоим всех объектам значения равномерно распределенной случайной величины (рисунок 1.3). В этом случае ландшафт приспособленности также имеет несколько локальных максимумов и конечное состояние системы зависит от начальных условий. Начало поиска из точки (0,1,0) завершается в точке (1,0,0), начальная конфигурация (0,0,1) приводит к точке (1,1,1).
Как мы решаем проблемы
Проведенная серия экспериментов дает нам возможность сделать несколько важных выводов. Во-первых, внутренние связи в системе радикально ее усложняют. Стюарт Кауффман показал, что в общем случае при больших значениях К (то есть большом количестве связей внутри системы) стратегия инкрементальной адаптации может приводить к кризисам, когда найденное значение приспособленности системы недостаточно для решения ее задач. Но в реальности мы имеем дело с крайне сложными системами. Если говорить о бизнесе, компания, которая сама по себе имеет весьма сложную структуру, действует на рынке в непрерывно изменяющихся условиях. Это связано с изменением приоритетов поставщиков и потребителей, действиями конкурентов и регуляторов рынка, развитием технологий и так далее. Отсюда возникает вопрос – есть ли альтернатива локальному поиску?
Второй вывод заключается в том, что при неизвестных законах взаимодействия компонент в системе, ее поведение кажется полностью хаотичным. Если бы мы ничего не знали о внутренних связях во втором эксперименте, удалось бы нам восстановить их из наблюдения за системой? В данном конкретном и весьма простом случае, скорее всего, да. Но в случае реальных и особенно открытых систем – нет. На практике «истинная случайность» и «детерминированный хаос» (свойства которого предсказуемы, но сделать это очень трудно) неразличимы. На этом акцентировал внимание Нассим Талеб, по его словам, «случайность – это всего лишь незнание». Это незнание ограничивает нашу возможность строить длительные прогнозы, чем дальше мы хотим заглянуть в будущее, тем большее количество факторов мы должны учитывать и тем больше возрастает неточность, поэтому мы можем работать только с качественными, а не количественными свойствами системы – обсуждать их, а не просчитывать. Вслед за Талебом можно сослаться на статью английского физика Майкла Берри[5], который исследовал движение бильярдного шара в реальных условиях. Для расчета первого столкновения – надо знать параметры покоящегося шара, силу удара и сопротивление поверхности стола. Девятый удар – нужно учесть гравитационное воздействие тела бьющего. Пятьдесят шестой удар – необходимо учесть динамику всех элементарных частиц Вселенной. Отметим, что это относится к системе, законы поведения которой полностью известны.