Высшая нервная деятельность. Учение русского исследователя И.П. Павлова, появившееся в первых десятилетиях нашего века, было началом изучения физиологических характеристик рецепторной и двигательной деятельности животных. Павловский метод анализа сложных нервных реакций позволяет рассматривать поведение животных в неразрывной связи с деятельностью их мозга. Работы И.П. Павлова (1951а, б) и его продолжателей Э.Г. Вацуро (1948), Б.М. Теплова (1949), В.П. Протопопова (1950), Л.Г. Воронина (1952, 1970), Э.А. Асратяна (1959, 1970), П.В. Симонова (1962, 1972), П.К. Анохина (1968), К.В. Судакова (1971), работы И.С. Бериташвили (1966, 1974), Л.В. Крушинского (1967, 1970) внесли большой вклад в понимание многих явлений, в том числе явлений поведения и психики животных. Большую роль они также играли в решении ряда практических задач при отборе и подготовке собак для полетов.
В данной работе с помощью изучения высшей нервной деятельности преследовалась цель определить влияние на нервную систему и психику животных тех условий, в которые попадают собаки при их подготовке к космическим полетам и во время самих полетов.
Исследование высшей нервной деятельности производилось в относительно непроницаемом для звуков изолированном помещении. Животные находились в одной его комнате, экспериментатор и записывающая аппаратура — в другой. Следить за животным можно было через смотровую щель.
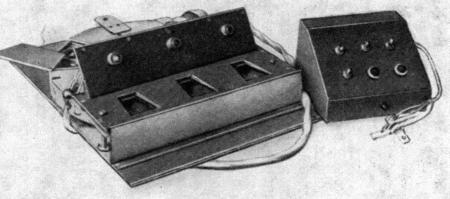
Рефлексы исследовались на специальной установке (рис. 12, 13). Перед животным располагалась панель с тремя видами световых сигналов разной интенсивности: красной лампочкой — 5 люкс, зеленой — 8 и желтой — 15 люкс. Панель под небольшим углом опиралась на своеобразный столик с тремя прямоугольными планками-крышками. Под этими планками располагались кормушки автоматически вращающегося диска, что обеспечивало подачу под планки трех-четырех нарезанных по 10–15 г кусочков сырого мяса. Движение собаки лапой с усилением не менее 50 г по средней линии центральной планки приводило к откидыванию крышки и доступу животного к кормушке.
Рис. 12. Установка для изучения двигательно-пищевых рефлексов
Экран со световыми раздражителями различной интенсивности и столик с кормушками, закрытыми планками-педалями. Мясо в кормушки подается путем вращения. Справа — пульт экспериментатора
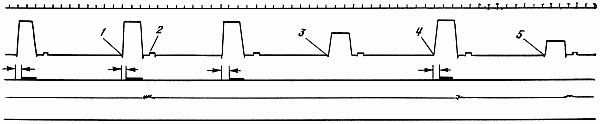
Рис. 13. Образец записи условно-рефлекторной деятельности животных
1 — положительный раздражитель; 2 — свет средней интенсивности (дифференцировка); 3 — свет большей интенсивности (дифференцировка); 4 — ответная реакция собаки; 5 — латентный период
На чернильно-пишущем приборе с большой скоростью протяжки регистрировалось время и длительность подачи светового сигнала разной интенсивности, латентный период двигательной реакции, количество бесполезных движений, совершающихся по другим планкам и совершающихся без должного нажима по центральной планке.
Для исследования высшей нервной деятельности применялась одинаковая последовательность подачи раздражителей. Стереотип условнорефлекторных раздражителей был следующим: вначале давали три положительных сигнала (красный свет малой интенсивности), затем две дифференцировки (желтый свет большой интенсивности), потом красный, т. е. опять положительный, а за ним зеленый дифференцировочный — свет средней интенсивности. После этого следовало четыре положительных сигнала, а затем две дифференцировки (желтый свет большой и зеленый свет средней интенсивности). Заканчивался стереотип тремя положительными (красными) сигналами.
Время изолированного действия каждого из условных раздражителей 10 сек. Интервал между ними 30 сек. Включение света совершалось автоматически с помощью электросекундомера. Действие положительного раздражителя прекращалось при проявлении у животных правильных движений и откидывании крышки кормушки.
Критерием прочности условных рефлексов служило минимальное число ошибок (один-два) в течение трех — пяти предъявлений систем условных рефлексов.
Задача быстрого получения требуемых рефлексов решалась с помощью дрессировки, осуществляемой по методу В.Л. Дурова. Эффективность такого метода доказывалась тем, что нужные экспериментатору движения возникали в течение одного занятия, отрабатывались и начинали появляться на искусственный сигнал в течение двух-трех. Таким образом, относительно сложные рефлексы формировались всего в течение трех-четырех дней.
На основе теории дрессировки (Дуров, 1924; Герд, 1957, 1958) было разработано и использовано в практике несколько способов выработки пищедобывательных рефлексов. Коротко опишем один из них, используемый для выработки описанного стереотипа условных реакций.
Экспериментатор на глазах животных клал мясо в кормушку и покрывал ее крышкой. Такие наталкивающие воздействия были рассчитаны на получение у собак реакций, из которых можно развить нужные действия. Появлялись многочисленные пробы собак носом сдвинуть планку-крышку. Такие реакции тем не менее не сопровождались подкрепляющими воздействиями. В результате животные, возбуждаясь под влиянием запаха мяса, переходили к другим приемам воздействия на крышку — возникали движения лапой. Несмотря на несоответствие формы, а иногда и места приложения этих действий (осуществлялись, например, вкось и не по средней планке), собаке давалась большая порция мяса — так называемое обильное подкрепляющее воздействие. Такое воздействие, с одной стороны, стимулировало различные виды реакций собак (лапами), а с другой — тормозило некоторые рефлексы и, главное, — действия носом.
Дальше экспериментатор не спешил кормить собак, а, показывая мясо над планкой-кормушкой, старался получить действие определенной формы — только по планке, не много скребущих движений, а одно; не касание, а с нажимом. Возникновение такой реакции или действия с одним-двумя нужными экспериментатору качествами поощрялось, но не обильными, а минимальными или средними порциями пищи. Такое количество корма закрепляло определенные черты действия и в то же время стимулировало возникновение других моментов, недостающих для совершенства всего рефлекса в целом.
Наталкивающие воздействия на этой стадии преобразовывались. Теперь уже экспериментатор не показывал мясо; для возникновения требующихся рефлексов достаточно было указательных жестов.
На этом же или на следующем занятии жесты человека стали предваряться зажиганием красной лампочки — будущего положительного раздражителя, а действия собак подкрепляться из кормушки. Если животные двигали лапой сразу после появления на экране света, они получали обильные или средние порции пищи, несмотря на деградированные виды возникавших у них действий. Сочетание наталкивающих и дифференцированных подкрепляющих воздействий быстро восстанавливало утерянные качества двигательных образований. С помощью обильных подкреплений также уничтожался страх собак перед щелчками, сопровождающими автоматическое движение кормушек.
Трудным моментом был переход собак к действиям без присутствия человека. Уход экспериментатора в соседнее помещение вызывал стремление к нему и тормозил многие активные реакции животных, звуки приборов начинали вызывать страх. Экспериментатору несколько раз приходилось входить к собакам и вновь репетировать с ними наиболее трудные элементы их поведения. Система наталкивающих воздействий значительно перестраивалась: снова становились необходимыми натуральные пищевые воздействия — показ мяса. Нарушалась система дифференцированного подкрепления: собаки кормились, несмотря на то что плохо или вообще не делали тех движений, которые были у них выработаны.
Сразу после того, как у животных отрабатывалась система нужных экспериментатору рефлексов на положительный сигнал, начинали применяться дифференцировочные раздражители. В варианте раздражителей, применяемых в этой работе, дифференцировка на свет средней интенсивности (зеленый) возникала у животных относительно быстро, а дифференцировка на свет большой интенсивности (желтый свет) образовывалась трудно и длительное время была непрочной.